A class that inherits from ActionPrimitivesLayer1 and integrates the force-torque sensing in order to stop the limb while reaching as soon as a contact with external objects is detected. More...
#include <actionPrimitives.h>
 Inheritance diagram for iCub::action::ActionPrimitivesLayer2:
Inheritance diagram for iCub::action::ActionPrimitivesLayer2: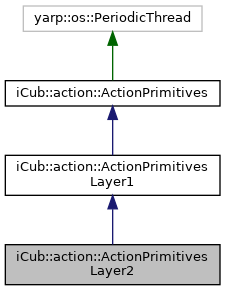
Public Member Functions | |
| ActionPrimitivesLayer2 () | |
| Default Constructor. | |
| ActionPrimitivesLayer2 (yarp::os::Property &opt) | |
| Constructor. | |
| virtual | ~ActionPrimitivesLayer2 () |
| Destructor. | |
| virtual bool | open (yarp::os::Property &opt) |
| Configure the object. | |
| virtual bool | isValid () const |
| Check if the object is initialized correctly. | |
| virtual void | close () |
| Deallocate the object. | |
| virtual bool | grasp (const yarp::sig::Vector &x, const yarp::sig::Vector &o, const yarp::sig::Vector &d1, const yarp::sig::Vector &d2) |
| More evolute version of grasp. | |
| virtual bool | grasp (const yarp::sig::Vector &x, const yarp::sig::Vector &o, const yarp::sig::Vector &d) |
| The usual grasp is still available. | |
| virtual bool | touch (const yarp::sig::Vector &x, const yarp::sig::Vector &o, const yarp::sig::Vector &d) |
| More evolute version of touch, exploiting contact detection. | |
| virtual bool | getExtWrench (yarp::sig::Vector &wrench) const |
| Retrieve the current wrench on the end-effector. | |
| virtual bool | getExtForceThres (double &thres) const |
| Retrieve the current threshold on the external force used to stop the limb while reaching. | |
| virtual bool | setExtForceThres (const double thres) |
| Set the threshold on the external force used to stop the limb while reaching. | |
| virtual bool | enableContactDetection () |
| Self-explaining :) | |
| virtual bool | disableContactDetection () |
| Self-explaining :) | |
| virtual bool | isContactDetectionEnabled (bool &f) const |
| Self-explaining :) | |
| virtual bool | checkContact (bool &f) const |
| Check whether the reaching has been stopped due to a contact with external objects. | |
| Public Member Functions inherited from iCub::action::ActionPrimitivesLayer1 | |
| ActionPrimitivesLayer1 () | |
| Default Constructor. | |
| ActionPrimitivesLayer1 (yarp::os::Property &opt) | |
| Constructor. | |
| virtual bool | tap (const yarp::sig::Vector &x1, const yarp::sig::Vector &o1, const yarp::sig::Vector &x2, const yarp::sig::Vector &o2, const double execTime=ACTIONPRIM_DISABLE_EXECTIME) |
| Tap the given target (combined action). | |
| Public Member Functions inherited from iCub::action::ActionPrimitives | |
| ActionPrimitives () | |
| Default Constructor. | |
| ActionPrimitives (yarp::os::Property &opt) | |
| Constructor. | |
| virtual | ~ActionPrimitives () |
| Destructor. | |
| virtual bool | pushAction (const yarp::sig::Vector &x, const yarp::sig::Vector &o, const std::string &handSeqKey, const double execTime=ACTIONPRIM_DISABLE_EXECTIME, ActionPrimitivesCallback *clb=NULL) |
| Insert a combination of arm and hand primitive actions in the actions queue. | |
| virtual bool | pushAction (const yarp::sig::Vector &x, const std::string &handSeqKey, const double execTime=ACTIONPRIM_DISABLE_EXECTIME, ActionPrimitivesCallback *clb=NULL) |
| Insert a combination of arm and hand primitive actions in the actions queue. | |
| virtual bool | pushAction (const yarp::sig::Vector &x, const yarp::sig::Vector &o, const double execTime=ACTIONPRIM_DISABLE_EXECTIME, ActionPrimitivesCallback *clb=NULL) |
| Insert the arm-primitive action reach for target in the actions queue. | |
| virtual bool | pushAction (const yarp::sig::Vector &x, const double execTime=ACTIONPRIM_DISABLE_EXECTIME, ActionPrimitivesCallback *clb=NULL) |
| Insert the arm-primitive action reach for target in the actions queue. | |
| virtual bool | pushAction (const std::string &handSeqKey, ActionPrimitivesCallback *clb=NULL) |
| Insert a hand-primitive action in the actions queue. | |
| virtual bool | pushAction (const std::deque< ActionPrimitivesWayPoint > &wayPoints, ActionPrimitivesCallback *clb=NULL) |
| Insert in the actions queue a trajectory in the operational space parametrized in terms of waypoints. | |
| virtual bool | pushAction (const std::deque< ActionPrimitivesWayPoint > &wayPoints, const std::string &handSeqKey, ActionPrimitivesCallback *clb=NULL) |
| Insert in the actions queue a combination of hand and arm trajectory in the operational space parametrized in terms of waypoints. | |
| virtual bool | pushWaitState (const double tmo, ActionPrimitivesCallback *clb=NULL) |
| Insert a wait state in the actions queue. | |
| virtual bool | reachPose (const yarp::sig::Vector &x, const yarp::sig::Vector &o, const double execTime=ACTIONPRIM_DISABLE_EXECTIME) |
| Immediately update the current reaching target (without affecting the actions queue) or initiate a new reach (if the actions queue is empty). | |
| virtual bool | reachPosition (const yarp::sig::Vector &x, const double execTime=ACTIONPRIM_DISABLE_EXECTIME) |
| Immediately update the current reaching target (without affecting the actions queue) or initiate a new reach (if the actions queue is empty). | |
| virtual bool | clearActionsQueue () |
| Empty the actions queue. | |
| virtual bool | lockActions () |
| Disable the possibility to yield any new action. | |
| virtual bool | unlockActions () |
| Enable the possibility to yield new actions. | |
| virtual bool | getActionsLockStatus () const |
| Return the actions lock status. | |
| virtual bool | addHandSeqWP (const std::string &handSeqKey, const yarp::sig::Vector &poss, const yarp::sig::Vector &vels, const yarp::sig::Vector &tols, const yarp::sig::Vector &thres, const double tmo) |
| Define an hand WayPoint (WP) to be added at the bottom of the hand motion sequence pointed by the key. | |
| virtual bool | addHandSequence (const std::string &handSeqKey, const yarp::os::Bottle &sequence) |
| Define an hand motion sequence from a configuration bottle. | |
| virtual bool | isValidHandSeq (const std::string &handSeqKey) |
| Check whether a sequence key is defined. | |
| virtual bool | removeHandSeq (const std::string &handSeqKey) |
| Remove an already existing hand motion sequence. | |
| std::deque< std::string > | getHandSeqList () |
| Return the list of available hand sequence keys. | |
| virtual bool | getHandSequence (const std::string &handSeqKey, yarp::os::Bottle &sequence) |
| Return a hand sequence. | |
| virtual bool | areFingersMoving (bool &f) |
| Query if fingers are moving. | |
| virtual bool | areFingersInPosition (bool &f) |
| Query if fingers are in position (cumulative response). | |
| virtual bool | areFingersInPosition (std::deque< bool > &f) |
| Query if fingers are in position (finger-wise response). | |
| virtual bool | getGraspModel (perception::Model *&model) const |
| Return the model used internally to detect external contacts. | |
| virtual bool | getCartesianIF (yarp::dev::ICartesianControl *&ctrl) const |
| Return the cartesian interface used internally to control the limb. | |
| virtual bool | getTorsoJoints (yarp::sig::Vector &torso) |
| Return the control status of torso joints. | |
| virtual bool | setTorsoJoints (const yarp::sig::Vector &torso) |
| Change the control status of torso joints. | |
| virtual bool | getPose (yarp::sig::Vector &x, yarp::sig::Vector &o) const |
| Get the current arm pose. | |
| virtual bool | stopControl () |
| Stop any ongoing arm/hand movements. | |
| virtual bool | setDefaultExecTime (const double execTime) |
| Set the default arm movement execution time. | |
| virtual double | getDefaultExecTime () const |
| Get the current default arm movement execution time. | |
| virtual bool | setTrackingMode (const bool f) |
| Set the task space controller in tracking or non-tracking mode. | |
| virtual bool | getTrackingMode () const |
| Get the current controller mode. | |
| virtual bool | enableArmWaving (const yarp::sig::Vector &restPos) |
| Enable the waving mode that keeps on moving the arm around a predefined position. | |
| virtual bool | disableArmWaving () |
| Disable the waving mode. | |
| virtual bool | enableReachingTimeout (const double tmo) |
| Enable timeout while reaching. | |
| virtual bool | disableReachingTimeout () |
| Disable timeout while reaching. | |
| virtual bool | checkActionsDone (bool &f, const bool sync=false) |
| Check whether all the actions in queue are accomplished. | |
| virtual bool | checkActionOnGoing (bool &f, const bool sync=false) |
| Check whether an action is still ongoing. | |
| virtual bool | syncCheckInterrupt (const bool disable=false) |
| Suddenly interrupt any blocking call that is pending on querying the action status. | |
| virtual bool | syncCheckReinstate () |
| Reinstate the blocking feature for future calls with sync switch on. | |
Protected Member Functions | |
| virtual void | init () |
| virtual void | postReachCallback () |
| virtual void | run () |
| Protected Member Functions inherited from iCub::action::ActionPrimitives | |
| virtual void | printMessage (const int logtype, const char *format,...) const |
| virtual bool | handleTorsoDOF (yarp::os::Property &opt, const std::string &key) |
| virtual void | disableTorsoDof () |
| virtual void | enableTorsoDof () |
| virtual bool | configHandSeq (yarp::os::Property &opt) |
| virtual bool | configGraspModel (yarp::os::Property &opt) |
| virtual bool | _pushAction (const bool execArm, const yarp::sig::Vector &x, const yarp::sig::Vector &o, const double execTime, const bool oEnabled, const bool execHand, const HandWayPoint &handWP, const bool handSeqTerminator, ActionPrimitivesCallback *clb) |
| virtual bool | _pushAction (const yarp::sig::Vector &x, const yarp::sig::Vector &o, const std::string &handSeqKey, const double execTime, ActionPrimitivesCallback *clb, const bool oEnabled) |
| virtual bool | handCheckMotionDone (const int jnt) |
| virtual bool | wait (const Action &action) |
| virtual bool | cmdArm (const Action &action) |
| virtual bool | cmdArmWP (const Action &action) |
| virtual bool | cmdHand (const Action &action) |
| virtual bool | isHandSeqEnded () |
| virtual bool | execQueuedAction () |
| virtual bool | execPendingHandSequences () |
Protected Attributes | |
| bool | skipFatherPart |
| bool | configuredLayer2 |
| bool | contactDetectionOn |
| bool | contactDetected |
| double | ext_force_thres |
| liftAndGraspCallback * | execLiftAndGrasp |
| touchCallback * | execTouch |
| yarp::os::BufferedPort< yarp::sig::Vector > | wbdynPortIn |
| yarp::sig::Vector | wrenchExternal |
| yarp::sig::Vector | grasp_d2 |
| yarp::sig::Vector | grasp_o |
| yarp::sig::Vector | encDataTorso |
| yarp::sig::Vector | encDataArm |
| Protected Attributes inherited from iCub::action::ActionPrimitives | |
| std::string | robot |
| std::string | local |
| std::string | part |
| yarp::dev::PolyDriver | polyHand |
| yarp::dev::PolyDriver | polyCart |
| yarp::dev::IControlMode * | modCtrl |
| yarp::dev::IEncoders * | encCtrl |
| yarp::dev::IPositionControl * | posCtrl |
| yarp::dev::ICartesianControl * | cartCtrl |
| perception::Model * | graspModel |
| yarp::os::PeriodicThread * | armWaver |
| std::mutex | mtx |
| std::mutex | mtx_motionStartEvent |
| std::condition_variable | cv_motionStartEvent |
| std::mutex | mtx_motionDoneEvent |
| std::condition_variable | cv_motionDoneEvent |
| bool | armMoveDone |
| bool | handMoveDone |
| bool | latchArmMoveDone |
| bool | latchHandMoveDone |
| bool | handSeqTerminator |
| bool | fingersInPosition |
| std::deque< bool > | fingerInPosition |
| bool | configured |
| bool | closed |
| bool | checkEnabled |
| bool | tracking_mode |
| bool | torsoActive |
| bool | reachTmoEnabled |
| bool | locked |
| bool | verbose |
| double | default_exec_time |
| double | waitTmo |
| double | reachTmo |
| double | latchTimerWait |
| double | latchTimerReach |
| double | latchTimerReachLog |
| int | jHandMin |
| int | jHandMax |
| yarp::sig::Vector | enableTorsoSw |
| yarp::sig::Vector | disableTorsoSw |
| yarp::sig::Vector | curHandFinalPoss |
| yarp::sig::Vector | curHandTols |
| yarp::sig::Vector | curGraspDetectionThres |
| double | curHandTmo |
| double | latchTimerHand |
| std::vector< int > | fingersJnts |
| std::set< int > | fingersJntsSet |
| std::set< int > | fingersMovingJntsSet |
| std::multimap< int, int > | fingers2JntsMap |
| ActionPrimitivesCallback * | actionClb |
| yarp::os::PeriodicThread * | actionWP |
| iCub::action::ActionPrimitives::ActionsQueue | actionsQueue |
| std::map< std::string, std::deque< HandWayPoint > > | handSeqMap |
Friends | |
| class | liftAndGraspCallback |
| class | touchCallback |
Detailed Description
A class that inherits from ActionPrimitivesLayer1 and integrates the force-torque sensing in order to stop the limb while reaching as soon as a contact with external objects is detected.
The module wholeBodyDynamics - in charge of computing the robot dynamics - must be running.
Definition at line 1069 of file actionPrimitives.h.
Constructor & Destructor Documentation
◆ ActionPrimitivesLayer2() [1/2]
| ActionPrimitivesLayer2::ActionPrimitivesLayer2 | ( | ) |
Default Constructor.
Definition at line 2155 of file actionPrimitives.cpp.
◆ ActionPrimitivesLayer2() [2/2]
| iCub::action::ActionPrimitivesLayer2::ActionPrimitivesLayer2 | ( | yarp::os::Property & | opt | ) |
Constructor.
- Parameters
-
opt the Property used to configure the object after its creation.
◆ ~ActionPrimitivesLayer2()
|
virtual |
Member Function Documentation
◆ checkContact()
|
virtual |
Check whether the reaching has been stopped due to a contact with external objects.
- Parameters
-
f the result of the check.
- Returns
- true/false on success/fail.
Definition at line 2452 of file actionPrimitives.cpp.
◆ close()
|
virtual |
Deallocate the object.
Reimplemented from iCub::action::ActionPrimitives.
Definition at line 2292 of file actionPrimitives.cpp.
◆ disableContactDetection()
|
virtual |
Self-explaining :)
- Returns
- true/false on success/fail.
Definition at line 2426 of file actionPrimitives.cpp.
◆ enableContactDetection()
|
virtual |
Self-explaining :)
- Returns
- true/false on success/fail.
Definition at line 2413 of file actionPrimitives.cpp.
◆ getExtForceThres()
|
virtual |
Retrieve the current threshold on the external force used to stop the limb while reaching.
- Parameters
-
thres where to return the threshold.
- Returns
- true/false on success/fail.
Definition at line 2387 of file actionPrimitives.cpp.
◆ getExtWrench()
|
virtual |
Retrieve the current wrench on the end-effector.
- Parameters
-
wrench a vector containing the external forces/moments acting on the end-effector.
- Returns
- true/false on success/fail.
Definition at line 2374 of file actionPrimitives.cpp.
◆ grasp() [1/2]
|
virtual |
The usual grasp is still available.
- Parameters
-
x the 3-d target position [m]. o the 4-d hand orientation used while reaching/grasping (given in axis-angle representation: ax ay az angle in rad). d the displacement [m] wrt the target position that identifies a location to be reached prior to grasping.
- Returns
- true/false on success/fail.
Reimplemented from iCub::action::ActionPrimitivesLayer1.
◆ grasp() [2/2]
|
virtual |
More evolute version of grasp.
It exploits the contact detection in order to lift up a bit the hand prior to grasping (this happens only after contact).
- Parameters
-
x the 3-d target position [m]. o the 4-d hand orientation used while reaching/grasping (given in axis-angle representation: ax ay az angle in rad). d1 the displacement [m] wrt the target position that identifies a location to be reached prior to grasping. d2 the displacement [m] that identifies the amount of the lift after the contact.
- Returns
- true/false on success/fail.
◆ init()
|
protectedvirtual |
Reimplemented from iCub::action::ActionPrimitives.
Definition at line 2172 of file actionPrimitives.cpp.
◆ isContactDetectionEnabled()
|
virtual |
Self-explaining :)
- Parameters
-
f the result of the check.
- Returns
- true/false on success/fail.
Definition at line 2439 of file actionPrimitives.cpp.
◆ isValid()
|
virtual |
Check if the object is initialized correctly.
- Returns
- true/fail on success/fail.
Reimplemented from iCub::action::ActionPrimitives.
Definition at line 2285 of file actionPrimitives.cpp.
◆ open()
|
virtual |
Configure the object.
- Parameters
-
opt the Property used to configure the object after its creation.
- Note
- To be called after object creation.
Further available options are:
ext_force_thres <double>: specify the maximum external force magnitude applied to the end-effector in order to detect contact between end-effector and objects while reaching.
wbdyn_stem_name <string>: specify the stem-name of the wholeBodyDynamics module.
wbdyn_port_name <string>: specify the tag-name of the port used by wholeBodyDynamics to stream out the wrench at the end-effector.
- Note
- A port called /<local>/<part>/wbdyn:i is open to acquire data provided by wholeBodyDynamics. The port is automatically connected to /<wbdyn_stem_name>/<part>/<wbdyn_port_name>.
Reimplemented from iCub::action::ActionPrimitives.
Definition at line 2243 of file actionPrimitives.cpp.
◆ postReachCallback()
|
protectedvirtual |
Reimplemented from iCub::action::ActionPrimitives.
Definition at line 2185 of file actionPrimitives.cpp.
◆ run()
|
protectedvirtual |
Reimplemented from iCub::action::ActionPrimitives.
Definition at line 2196 of file actionPrimitives.cpp.
◆ setExtForceThres()
|
virtual |
Set the threshold on the external force used to stop the limb while reaching.
- Parameters
-
thres the new threshold.
- Returns
- true/false on success/fail.
Definition at line 2400 of file actionPrimitives.cpp.
◆ touch()
|
virtual |
More evolute version of touch, exploiting contact detection.
- Parameters
-
x the 3-d target position [m]. o the 4-d hand orientation used while reaching/touching (given in axis-angle representation: ax ay az angle in rad). d the displacement [m] wrt the target position that identifies a location to be reached prior to touching.
- Returns
- true/false on success/fail.
Reimplemented from iCub::action::ActionPrimitivesLayer1.
Definition at line 2355 of file actionPrimitives.cpp.
Friends And Related Symbol Documentation
◆ liftAndGraspCallback
|
friend |
Definition at line 1092 of file actionPrimitives.h.
◆ touchCallback
|
friend |
Definition at line 1093 of file actionPrimitives.h.
Member Data Documentation
◆ configuredLayer2
|
protected |
Definition at line 1073 of file actionPrimitives.h.
◆ contactDetected
|
protected |
Definition at line 1075 of file actionPrimitives.h.
◆ contactDetectionOn
|
protected |
Definition at line 1074 of file actionPrimitives.h.
◆ encDataArm
|
protected |
Definition at line 1090 of file actionPrimitives.h.
◆ encDataTorso
|
protected |
Definition at line 1089 of file actionPrimitives.h.
◆ execLiftAndGrasp
|
protected |
Definition at line 1079 of file actionPrimitives.h.
◆ execTouch
|
protected |
Definition at line 1080 of file actionPrimitives.h.
◆ ext_force_thres
|
protected |
Definition at line 1077 of file actionPrimitives.h.
◆ grasp_d2
|
protected |
Definition at line 1086 of file actionPrimitives.h.
◆ grasp_o
|
protected |
Definition at line 1087 of file actionPrimitives.h.
◆ skipFatherPart
|
protected |
Definition at line 1072 of file actionPrimitives.h.
◆ wbdynPortIn
|
protected |
Definition at line 1082 of file actionPrimitives.h.
◆ wrenchExternal
|
protected |
Definition at line 1084 of file actionPrimitives.h.
The documentation for this class was generated from the following files:
- icub-main/src/libraries/actionPrimitives/include/iCub/action/actionPrimitives.h
- icub-main/src/libraries/actionPrimitives/src/actionPrimitives.cpp