#include <mutex>#include <condition_variable>#include <string>#include <vector>#include <deque>#include <set>#include <map>#include <yarp/os/all.h>#include <yarp/dev/all.h>#include <yarp/sig/all.h>#include <iCub/perception/models.h> Include dependency graph for actionPrimitives.h:
Include dependency graph for actionPrimitives.h: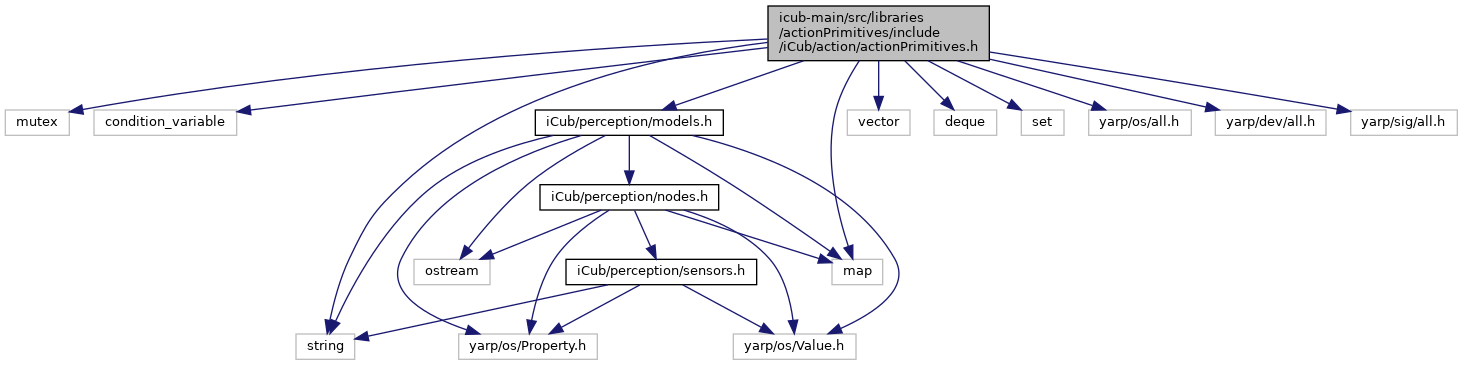 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: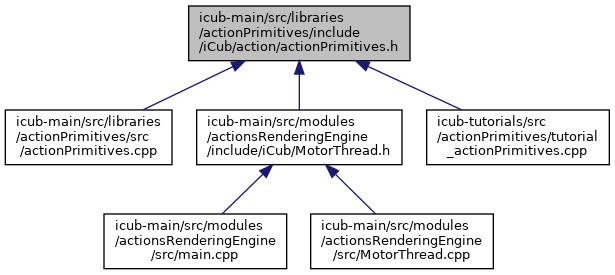
Go to the source code of this file.
Classes | |
| class | iCub::action::ActionPrimitivesCallback |
| Class for defining routines to be called when action is completed. More... | |
| struct | iCub::action::ActionPrimitivesWayPoint |
| Struct for defining way points used for movements in the operational space. More... | |
| class | iCub::action::ActionPrimitives |
| The base class defining actions. More... | |
| struct | iCub::action::ActionPrimitives::HandWayPoint |
| struct | iCub::action::ActionPrimitives::Action |
| class | iCub::action::ActionPrimitives::ActionsQueue |
| class | iCub::action::ActionPrimitivesLayer1 |
| A derived class defining a first abstraction layer on top of actionPrimitives father class. More... | |
| class | iCub::action::liftAndGraspCallback |
| class | iCub::action::touchCallback |
| class | iCub::action::ActionPrimitivesLayer2 |
| A class that inherits from ActionPrimitivesLayer1 and integrates the force-torque sensing in order to stop the limb while reaching as soon as a contact with external objects is detected. More... | |
Namespaces | |
| namespace | iCub |
| This file contains the definition of unique IDs for the body parts and the skin parts of the robot. | |
| namespace | iCub::action |
Macros | |
| #define | ACTIONPRIM_DISABLE_EXECTIME -1.0 |
Macro Definition Documentation
◆ ACTIONPRIM_DISABLE_EXECTIME
| #define ACTIONPRIM_DISABLE_EXECTIME -1.0 |
Definition at line 96 of file actionPrimitives.h.