canbusmotioncontrol : driver for motor control boards on a CAN bus.
More...
#include <CanBusMotionControl.h>
 Inheritance diagram for yarp::dev::CanBusMotionControl:
Inheritance diagram for yarp::dev::CanBusMotionControl: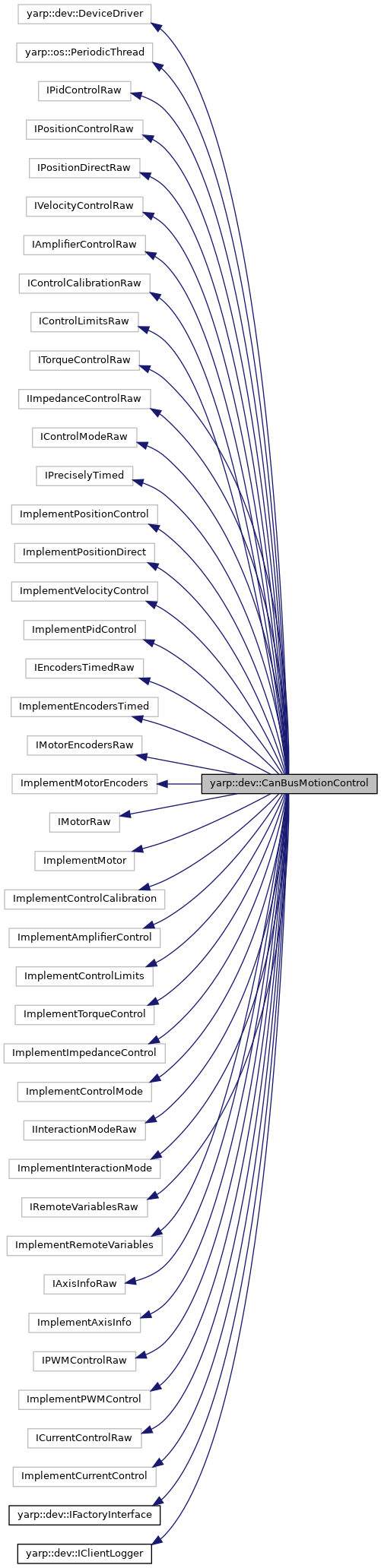
Public Member Functions | |
| CanBusMotionControl () | |
| Default constructor. | |
| virtual | ~CanBusMotionControl () |
| Destructor. | |
| virtual bool | open (yarp::os::Searchable &config) |
| Open the device driver and start communication with the hardware. | |
| bool | open (const CanBusMotionControlParameters &par) |
| Open the device driver. | |
| virtual bool | close (void) |
| Closes the device driver. | |
| yarp::dev::DeviceDriver * | createDevice (yarp::os::Searchable &config) |
| void | setServerLogger (const IServerLogger *server) |
| virtual bool | setPidRaw (const PidControlTypeEnum &pidtype, int j, const Pid &pid) override |
| virtual bool | setPidsRaw (const PidControlTypeEnum &pidtype, const Pid *pids) override |
| virtual bool | setPidReferenceRaw (const PidControlTypeEnum &pidtype, int j, double ref) override |
| cmd is a SingleAxis poitner with 1 double arg | |
| virtual bool | setPidReferencesRaw (const PidControlTypeEnum &pidtype, const double *refs) override |
| cmd is an array of double (LATER: to be optimized). | |
| virtual bool | setPidErrorLimitRaw (const PidControlTypeEnum &pidtype, int j, double limit) override |
| virtual bool | setPidErrorLimitsRaw (const PidControlTypeEnum &pidtype, const double *limits) override |
| virtual bool | getPidErrorRaw (const PidControlTypeEnum &pidtype, int j, double *err) override |
| virtual bool | getPidErrorsRaw (const PidControlTypeEnum &pidtype, double *errs) override |
| virtual bool | getPidOutputRaw (const PidControlTypeEnum &pidtype, int j, double *out) override |
| virtual bool | getPidOutputsRaw (const PidControlTypeEnum &pidtype, double *outs) override |
| virtual bool | getPidRaw (const PidControlTypeEnum &pidtype, int j, Pid *pid) override |
| virtual bool | getPidsRaw (const PidControlTypeEnum &pidtype, Pid *pids) override |
| virtual bool | getPidReferenceRaw (const PidControlTypeEnum &pidtype, int j, double *ref) override |
| virtual bool | getPidReferencesRaw (const PidControlTypeEnum &pidtype, double *refs) override |
| virtual bool | getPidErrorLimitRaw (const PidControlTypeEnum &pidtype, int j, double *limit) override |
| virtual bool | getPidErrorLimitsRaw (const PidControlTypeEnum &pidtype, double *limits) override |
| virtual bool | resetPidRaw (const PidControlTypeEnum &pidtype, int j) override |
| virtual bool | disablePidRaw (const PidControlTypeEnum &pidtype, int j) override |
| virtual bool | enablePidRaw (const PidControlTypeEnum &pidtype, int j) override |
| virtual bool | setPidOffsetRaw (const PidControlTypeEnum &pidtype, int j, double v) override |
| virtual bool | isPidEnabledRaw (const PidControlTypeEnum &pidtype, int j, bool *enabled) |
| virtual bool | getAxes (int *ax) override |
| POSITION CONTROL INTERFACE RAW. | |
| virtual bool | positionMoveRaw (int j, double ref) override |
| virtual bool | positionMoveRaw (const double *refs) override |
| virtual bool | relativeMoveRaw (int j, double delta) override |
| virtual bool | relativeMoveRaw (const double *deltas) override |
| virtual bool | checkMotionDoneRaw (bool *flag) override |
| ret is a pointer to a bool | |
| virtual bool | checkMotionDoneRaw (int j, bool *flag) override |
| check motion done, single axis. | |
| virtual bool | setRefSpeedRaw (int j, double sp) override |
| virtual bool | setRefSpeedsRaw (const double *spds) override |
| virtual bool | setRefAccelerationRaw (int j, double acc) override |
| virtual bool | setRefAccelerationsRaw (const double *accs) override |
| virtual bool | getRefSpeedRaw (int j, double *ref) override |
| virtual bool | getRefSpeedsRaw (double *spds) override |
| cmd is an array of double (LATER: to be optimized). | |
| virtual bool | getRefAccelerationRaw (int j, double *acc) override |
| cmd is an array of double (LATER: to be optimized). | |
| virtual bool | getRefAccelerationsRaw (double *accs) override |
| cmd is an array of double (LATER: to be optimized). | |
| virtual bool | stopRaw (int j) override |
| virtual bool | stopRaw () override |
| bool | helper_setPosPidRaw (int j, const Pid &pid) |
| bool | helper_getPosPidRaw (int j, Pid *pid) |
| virtual bool | getRefTorqueRaw (int j, double *ref_trq) override |
| TORQUE CONTROL INTERFACE RAW. | |
| virtual bool | getRefTorquesRaw (double *ref_trqs) override |
| cmd is an array of double (LATER: to be optimized). | |
| virtual bool | setRefTorqueRaw (int j, double ref_trq) override |
| cmd is a SingleAxis poitner with 1 double arg | |
| virtual bool | setRefTorquesRaw (const double *ref_trqs) override |
| cmd is an array of double (LATER: to be optimized). | |
| virtual bool | setRefTorquesRaw (const int n_joint, const int *joints, const double *t) override |
| virtual bool | getTorqueRaw (int j, double *trq) override |
| cmd is a SingleAxis pointer with 1 double arg | |
| virtual bool | getTorquesRaw (double *trqs) override |
| cmd is an array of double (LATER: to be optimized). | |
| virtual bool | getTorqueRangeRaw (int j, double *min, double *max) override |
| virtual bool | getTorqueRangesRaw (double *min, double *max) override |
| virtual bool | getMotorTorqueParamsRaw (int j, MotorTorqueParameters *params) override |
| virtual bool | setMotorTorqueParamsRaw (int j, const MotorTorqueParameters params) override |
| bool | getFilterTypeRaw (int j, int *type) |
| bool | setFilterTypeRaw (int j, int type) |
| bool | helper_setTrqPidRaw (int j, const Pid &pid) |
| bool | helper_getTrqPidRaw (int j, Pid *pid) |
| virtual bool | getImpedanceRaw (int j, double *stiff, double *damp) override |
| IMPEDANCE CONTROL INTERFACE RAW. | |
| virtual bool | setImpedanceRaw (int j, double stiff, double damp) override |
| virtual bool | getImpedanceOffsetRaw (int j, double *offs) override |
| virtual bool | setImpedanceOffsetRaw (int j, double offs) override |
| virtual bool | getCurrentImpedanceLimitRaw (int j, double *min_stiff, double *max_stiff, double *min_damp, double *max_damp) override |
| virtual bool | getControlModeRaw (int j, int *v) override |
| virtual bool | getControlModesRaw (int *v) override |
| virtual bool | getControlModesRaw (const int n_joint, const int *joints, int *modes) override |
| virtual bool | setControlModeRaw (const int j, const int mode) override |
| virtual bool | setControlModesRaw (const int n_joint, const int *joints, int *modes) override |
| virtual bool | setControlModesRaw (int *modes) override |
| virtual bool | getRemoteVariableRaw (std::string key, yarp::os::Bottle &val) override |
| virtual bool | setRemoteVariableRaw (std::string key, const yarp::os::Bottle &val) override |
| virtual bool | getRemoteVariablesListRaw (yarp::os::Bottle *listOfKeys) override |
| virtual bool | velocityMoveRaw (int j, double sp) override |
| Velocity control interface raw. | |
| virtual bool | velocityMoveRaw (const double *sp) override |
| cmd is an array of double of length njoints specifying speed for each axis | |
| bool | setVelocityShiftRaw (int j, double val) |
| bool | setVelocityTimeoutRaw (int j, double val) |
| bool | setSpeedEstimatorShiftRaw (int j, double jnt_speed, double jnt_acc, double mot_speed, double mot_acc) |
| virtual bool | resetEncoderRaw (int j) override |
| virtual bool | resetEncodersRaw () override |
| virtual bool | setEncoderRaw (int j, double val) override |
| virtual bool | setEncodersRaw (const double *vals) override |
| virtual bool | getEncoderRaw (int j, double *v) override |
| virtual bool | getEncodersRaw (double *encs) override |
| virtual bool | getEncoderSpeedRaw (int j, double *sp) override |
| virtual bool | getEncoderSpeedsRaw (double *spds) override |
| virtual bool | getEncoderAccelerationRaw (int j, double *spds) override |
| virtual bool | getEncoderAccelerationsRaw (double *accs) override |
| virtual bool | getEncodersTimedRaw (double *v, double *t) override |
| virtual bool | getEncoderTimedRaw (int j, double *v, double *t) override |
| virtual bool | getNumberOfMotorEncodersRaw (int *num) override |
| virtual bool | resetMotorEncoderRaw (int m) override |
| virtual bool | resetMotorEncodersRaw () override |
| virtual bool | setMotorEncoderRaw (int m, const double val) override |
| virtual bool | setMotorEncodersRaw (const double *vals) override |
| virtual bool | getMotorEncoderRaw (int m, double *v) override |
| virtual bool | getMotorEncodersRaw (double *encs) override |
| virtual bool | getMotorEncoderCountsPerRevolutionRaw (int m, double *cpr) override |
| virtual bool | setMotorEncoderCountsPerRevolutionRaw (int m, const double cpr) override |
| virtual bool | getMotorEncoderSpeedRaw (int m, double *sp) override |
| virtual bool | getMotorEncoderSpeedsRaw (double *spds) override |
| virtual bool | getMotorEncoderAccelerationRaw (int m, double *spds) override |
| virtual bool | getMotorEncoderAccelerationsRaw (double *accs) override |
| virtual bool | getMotorEncodersTimedRaw (double *v, double *t) override |
| virtual bool | getMotorEncoderTimedRaw (int m, double *v, double *t) override |
| virtual bool | enableAmpRaw (int j) override |
| virtual bool | disableAmpRaw (int j) override |
| virtual bool | getCurrentsRaw (double *vals) override |
| virtual bool | getCurrentRaw (int j, double *val) override |
| virtual bool | setMaxCurrentRaw (int j, double val) override |
| virtual bool | getMaxCurrentRaw (int j, double *val) override |
| virtual bool | getAmpStatusRaw (int *st) override |
| virtual bool | getAmpStatusRaw (int j, int *st) override |
| virtual bool | getPWMRaw (int j, double *val) override |
| virtual bool | getPWMLimitRaw (int j, double *val) override |
| virtual bool | setPWMLimitRaw (int j, const double val) override |
| virtual bool | getPowerSupplyVoltageRaw (int j, double *val) override |
| virtual bool | getNumberOfMotorsRaw (int *m) override |
| IMotor. | |
| virtual bool | getTemperatureRaw (int m, double *val) override |
| virtual bool | getTemperaturesRaw (double *vals) override |
| virtual bool | getTemperatureLimitRaw (int m, double *temp) override |
| virtual bool | setTemperatureLimitRaw (int m, const double temp) override |
| virtual bool | getPeakCurrentRaw (int m, double *val) override |
| virtual bool | setPeakCurrentRaw (int m, const double val) override |
| virtual bool | getNominalCurrentRaw (int m, double *val) override |
| virtual bool | setNominalCurrentRaw (int m, const double val) override |
| virtual bool | getAxisNameRaw (int axis, std::string &name) override |
| IAxisInfo. | |
| virtual bool | getJointTypeRaw (int axis, yarp::dev::JointTypeEnum &type) override |
| virtual bool | calibrationDoneRaw (int j) override |
| virtual bool | calibrateAxisWithParamsRaw (int axis, unsigned int type, double p1, double p2, double p3) override |
| virtual bool | setCalibrationParametersRaw (int j, const CalibrationParameters ¶ms) override |
| virtual bool | setPrintFunction (int(*f)(const char *fmt,...)) |
| IControlDebug Interface. | |
| virtual bool | loadBootMemory () |
| virtual bool | saveBootMemory () |
| virtual bool | setParameterRaw (int j, unsigned int type, double value) |
| virtual bool | getParameterRaw (int j, unsigned int type, double *value) |
| virtual bool | setDebugParameterRaw (int j, unsigned int index, double value) |
| virtual bool | getDebugParameterRaw (int j, unsigned int index, double *value) |
| virtual bool | setDebugReferencePositionRaw (int j, double value) |
| virtual bool | getDebugReferencePositionRaw (int j, double *value) |
| virtual bool | setLimitsRaw (int axis, double min, double max) override |
| virtual bool | getLimitsRaw (int axis, double *min, double *max) override |
| virtual bool | setVelLimitsRaw (int axis, double min, double max) override |
| virtual bool | getVelLimitsRaw (int axis, double *min, double *max) override |
| virtual yarp::os::Stamp | getLastInputStamp () override |
| virtual bool | positionMoveRaw (const int n_joint, const int *joints, const double *refs) override |
| virtual bool | relativeMoveRaw (const int n_joint, const int *joints, const double *deltas) override |
| virtual bool | checkMotionDoneRaw (const int n_joint, const int *joints, bool *flags) override |
| virtual bool | setRefSpeedsRaw (const int n_joint, const int *joints, const double *spds) override |
| virtual bool | setRefAccelerationsRaw (const int n_joint, const int *joints, const double *accs) override |
| virtual bool | getRefSpeedsRaw (const int n_joint, const int *joints, double *spds) override |
| virtual bool | getRefAccelerationsRaw (const int n_joint, const int *joints, double *accs) override |
| virtual bool | stopRaw (const int n_joint, const int *joints) override |
| virtual bool | getTargetPositionRaw (const int joint, double *ref) override |
| virtual bool | getTargetPositionsRaw (double *refs) override |
| virtual bool | getTargetPositionsRaw (const int n_joint, const int *joints, double *refs) override |
| virtual bool | velocityMoveRaw (const int n_joint, const int *joints, const double *spds) override |
| virtual bool | getRefVelocityRaw (const int joint, double *ref) override |
| virtual bool | getRefVelocitiesRaw (double *refs) override |
| virtual bool | getRefVelocitiesRaw (const int n_joint, const int *joints, double *refs) override |
| bool | helper_getVelPidRaw (int j, Pid *pid) |
| bool | helper_setVelPidRaw (int j, const Pid &pid) |
| virtual bool | getFirmwareVersionRaw (int axis, can_protocol_info const &icub_interface_protocol, firmware_info *info) |
| virtual bool | setTorqueSource (int axis, char board_id, char board_chan) |
| virtual bool | setPositionRaw (int j, double ref) override |
| virtual bool | setPositionsRaw (const int n_joint, const int *joints, const double *refs) override |
| virtual bool | setPositionsRaw (const double *refs) override |
| virtual bool | getRefPositionRaw (const int joint, double *ref) override |
| virtual bool | getRefPositionsRaw (double *refs) override |
| virtual bool | getRefPositionsRaw (const int n_joint, const int *joints, double *refs) override |
| virtual bool | getInteractionModeRaw (int axis, yarp::dev::InteractionModeEnum *mode) override |
| virtual bool | getInteractionModesRaw (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| virtual bool | getInteractionModesRaw (yarp::dev::InteractionModeEnum *modes) override |
| virtual bool | setInteractionModeRaw (int axis, yarp::dev::InteractionModeEnum mode) override |
| virtual bool | setInteractionModesRaw (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| virtual bool | setInteractionModesRaw (yarp::dev::InteractionModeEnum *modes) override |
| virtual bool | setRefDutyCycleRaw (int j, double v) override |
| virtual bool | setRefDutyCyclesRaw (const double *v) override |
| virtual bool | getRefDutyCycleRaw (int j, double *v) override |
| virtual bool | getRefDutyCyclesRaw (double *v) override |
| virtual bool | getDutyCycleRaw (int j, double *v) override |
| virtual bool | getDutyCyclesRaw (double *v) override |
| virtual bool | getCurrentRangeRaw (int j, double *min, double *max) override |
| virtual bool | getCurrentRangesRaw (double *min, double *max) override |
| virtual bool | setRefCurrentsRaw (const double *t) override |
| virtual bool | setRefCurrentRaw (int j, double t) override |
| virtual bool | setRefCurrentsRaw (const int n_joint, const int *joints, const double *t) override |
| virtual bool | getRefCurrentsRaw (double *t) override |
| virtual bool | getRefCurrentRaw (int j, double *t) override |
| bool | helper_setCurPidRaw (int j, const Pid &pid) |
| bool | helper_getCurPidRaw (int j, Pid *pid) |
| Public Member Functions inherited from yarp::dev::IFactoryInterface | |
| virtual | ~IFactoryInterface () |
Protected Types | |
| enum | { MAX_SHORT = 32767 , MIN_SHORT = -32768 , MAX_INT = 0x7fffffff , MIN_INT = 0x80000000 } |
| time stamp for last received position move command More... | |
| enum | { CAN_SKIP_ADDR = 0x80 } |
Protected Member Functions | |
| bool | setBCastMessages (int axis, unsigned int v) |
| sets the broadcast policy for a given board (don't need to be called twice). | |
| bool | ENABLED (int axis) |
| helper function to check whether the enabled flag is on or off. | |
| virtual void | run (void) |
| virtual bool | threadInit () |
| virtual void | threadRelease () |
| bool | _writeWord16 (int msg, int axis, short s) |
| to send a Word16. | |
| bool | _writeWord16Ex (int msg, int axis, short s1, short s2, bool check=true) |
| two shorts in a single Can message (both must belong to the same control card). | |
| bool | _readWord16 (int msg, int axis, short &value) |
| bool | _readWord16Ex (int msg, int axis, short &value1, short &value2) |
| bool | _readWord16Array (int msg, double *out) |
| reads an array. | |
| bool | _readDWord (int msg, int axis, int &value) |
| READ functions sends a message and gets a dword back. | |
| bool | _readDWordArray (int msg, double *out) |
| reads an array of double words. | |
| bool | _writeDWord (int msg, int axis, int value) |
| write a DWord | |
| bool | _writeNone (int msg, int axis) |
| WRITE functions sends a message without parameters. | |
| bool | _writeByte8 (int msg, int axis, int value) |
| write a byte | |
| bool | _readByte8 (int msg, int axis, int &value) |
| bool | _writeByteWords16 (int msg, int axis, unsigned char value, short s1, short s2, short s3) |
| icubCanProto_controlmode_t | from_modevocab_to_modeint (int modevocab) |
| int | from_modeint_to_modevocab (unsigned char modeint) |
| unsigned char | from_interactionvocab_to_interactionint (int interactionvocab) |
| int | from_interactionint_to_interactionvocab (unsigned char interactionint) |
| short | S_16 (double x) const |
| int | S_32 (double x) const |
Protected Attributes | |
| void * | system_resources |
| std::recursive_mutex | _mutex |
| ICanBus * | canController |
| bool | _writerequested |
| bool | _noreply |
| bool | _opened |
| ThreadPool2 * | threadPool |
| int | _filter |
| filter for recurrent messages. | |
| axisTorqueHelper * | _axisTorqueHelper |
| axisImpedanceHelper * | _axisImpedanceHelper |
| firmwareVersionHelper * | _firmwareVersionHelper |
| speedEstimationHelper * | _speedEstimationHelper |
| axisPositionDirectHelper * | _axisPositionDirectHelper |
| double * | _ref_speeds |
| double * | _ref_command_speeds |
| double * | _ref_accs |
| double * | _ref_torques |
| double * | _ref_command_positions |
| double * | _ref_positions |
| double * | _max_vel_jnt_cmd |
| bool | _MCtorqueControlEnabled |
| double * | _last_position_move_time |
Detailed Description
canbusmotioncontrol : driver for motor control boards on a CAN bus.
This device contains code which handles communication to the motor control boards on a CAN bus. It converts requests from function calls into CAN bus messages for the motor control boards. A thread monitors the bus for incoming messages and dispatches replies to calling threads.
Communication with the CAN bus is done through the standard YARP ICanBus interface.
| YARP device name |
|---|
canbusmotioncontrol |
Definition at line 654 of file CanBusMotionControl.h.
Member Enumeration Documentation
◆ anonymous enum
|
protected |
time stamp for last received position move command
| Enumerator | |
|---|---|
| MAX_SHORT | |
| MIN_SHORT | |
| MAX_INT | |
| MIN_INT | |
Definition at line 1180 of file CanBusMotionControl.h.
◆ anonymous enum
|
protected |
| Enumerator | |
|---|---|
| CAN_SKIP_ADDR | |
Definition at line 1181 of file CanBusMotionControl.h.
Constructor & Destructor Documentation
◆ CanBusMotionControl()
| CanBusMotionControl::CanBusMotionControl | ( | ) |
Default constructor.
Construction is done in two stages, first build the object and then open the device driver.
Definition at line 2391 of file CanBusMotionControl.cpp.
◆ ~CanBusMotionControl()
|
virtual |
Destructor.
Definition at line 2431 of file CanBusMotionControl.cpp.
Member Function Documentation
◆ _readByte8()
|
protected |
Definition at line 7106 of file CanBusMotionControl.cpp.
◆ _readDWord()
|
protected |
READ functions sends a message and gets a dword back.
Definition at line 6936 of file CanBusMotionControl.cpp.
◆ _readDWordArray()
|
protected |
reads an array of double words.
Definition at line 6986 of file CanBusMotionControl.cpp.
◆ _readWord16()
|
protected |
Definition at line 7054 of file CanBusMotionControl.cpp.
◆ _readWord16Array()
|
protected |
reads an array.
Definition at line 7216 of file CanBusMotionControl.cpp.
◆ _readWord16Ex()
|
protected |
Definition at line 7158 of file CanBusMotionControl.cpp.
◆ _writeByte8()
|
protected |
write a byte
Definition at line 6816 of file CanBusMotionControl.cpp.
◆ _writeByteWords16()
|
protected |
prepare Can message.
Definition at line 6894 of file CanBusMotionControl.cpp.
◆ _writeDWord()
|
protected |
write a DWord
Definition at line 6840 of file CanBusMotionControl.cpp.
◆ _writeNone()
|
protected |
WRITE functions sends a message without parameters.
Definition at line 6768 of file CanBusMotionControl.cpp.
◆ _writeWord16()
|
protected |
◆ _writeWord16Ex()
|
protected |
two shorts in a single Can message (both must belong to the same control card).
prepare Can message.
axis is even.
Definition at line 6864 of file CanBusMotionControl.cpp.
◆ calibrateAxisWithParamsRaw()
|
overridevirtual |
Definition at line 5608 of file CanBusMotionControl.cpp.
◆ calibrationDoneRaw()
|
overridevirtual |
Definition at line 6424 of file CanBusMotionControl.cpp.
◆ checkMotionDoneRaw() [1/3]
|
overridevirtual |
ret is a pointer to a bool
Definition at line 5542 of file CanBusMotionControl.cpp.
◆ checkMotionDoneRaw() [2/3]
|
overridevirtual |
Definition at line 6531 of file CanBusMotionControl.cpp.
◆ checkMotionDoneRaw() [3/3]
|
overridevirtual |
check motion done, single axis.
Definition at line 5523 of file CanBusMotionControl.cpp.
◆ close()
|
virtual |
Closes the device driver.
- Returns
- true on success.
default initialization for this device driver.
stops the thread first (joins too).
Definition at line 2972 of file CanBusMotionControl.cpp.
◆ createDevice()
|
virtual |
Implements yarp::dev::IFactoryInterface.
Definition at line 7282 of file CanBusMotionControl.cpp.
◆ disableAmpRaw()
|
overridevirtual |
Definition at line 6263 of file CanBusMotionControl.cpp.
◆ disablePidRaw()
|
overridevirtual |
Definition at line 5448 of file CanBusMotionControl.cpp.
◆ enableAmpRaw()
|
overridevirtual |
Definition at line 6268 of file CanBusMotionControl.cpp.
◆ ENABLED()
|
inlineprotected |
helper function to check whether the enabled flag is on or off.
- Parameters
-
axis is the axis to check for.
- Returns
- true if the axis is enabled and processing of the message can in fact continue.
Definition at line 6760 of file CanBusMotionControl.cpp.
◆ enablePidRaw()
|
overridevirtual |
Definition at line 5359 of file CanBusMotionControl.cpp.
◆ from_interactionint_to_interactionvocab()
|
inlineprotected |
Definition at line 3888 of file CanBusMotionControl.cpp.
◆ from_interactionvocab_to_interactionint()
|
inlineprotected |
Definition at line 3871 of file CanBusMotionControl.cpp.
◆ from_modeint_to_modevocab()
|
inlineprotected |
Definition at line 3953 of file CanBusMotionControl.cpp.
◆ from_modevocab_to_modeint()
|
inlineprotected |
Definition at line 3906 of file CanBusMotionControl.cpp.
◆ getAmpStatusRaw() [1/2]
|
overridevirtual |
Definition at line 6450 of file CanBusMotionControl.cpp.
◆ getAmpStatusRaw() [2/2]
|
overridevirtual |
Definition at line 6467 of file CanBusMotionControl.cpp.
◆ getAxes()
|
overridevirtual |
POSITION CONTROL INTERFACE RAW.
Definition at line 4270 of file CanBusMotionControl.cpp.
◆ getAxisNameRaw()
|
overridevirtual |
IAxisInfo.
Definition at line 4198 of file CanBusMotionControl.cpp.
◆ getControlModeRaw()
|
overridevirtual |
Definition at line 4019 of file CanBusMotionControl.cpp.
◆ getControlModesRaw() [1/2]
|
overridevirtual |
Definition at line 4041 of file CanBusMotionControl.cpp.
◆ getControlModesRaw() [2/2]
|
overridevirtual |
Definition at line 3833 of file CanBusMotionControl.cpp.
◆ getCurrentImpedanceLimitRaw()
|
overridevirtual |
Definition at line 4383 of file CanBusMotionControl.cpp.
◆ getCurrentRangeRaw()
|
overridevirtual |
Definition at line 7520 of file CanBusMotionControl.cpp.
◆ getCurrentRangesRaw()
|
overridevirtual |
Definition at line 7525 of file CanBusMotionControl.cpp.
◆ getCurrentRaw()
|
overridevirtual |
Definition at line 6288 of file CanBusMotionControl.cpp.
◆ getCurrentsRaw()
|
overridevirtual |
Definition at line 6274 of file CanBusMotionControl.cpp.
◆ getDebugParameterRaw()
|
virtual |
Definition at line 5119 of file CanBusMotionControl.cpp.
◆ getDebugReferencePositionRaw()
|
virtual |
Definition at line 5178 of file CanBusMotionControl.cpp.
◆ getDutyCycleRaw()
|
overridevirtual |
Definition at line 7485 of file CanBusMotionControl.cpp.
◆ getDutyCyclesRaw()
|
overridevirtual |
Definition at line 7495 of file CanBusMotionControl.cpp.
◆ getEncoderAccelerationRaw()
|
overridevirtual |
Definition at line 6096 of file CanBusMotionControl.cpp.
◆ getEncoderAccelerationsRaw()
|
overridevirtual |
Definition at line 6083 of file CanBusMotionControl.cpp.
◆ getEncoderRaw()
|
overridevirtual |
Definition at line 6048 of file CanBusMotionControl.cpp.
◆ getEncoderSpeedRaw()
|
overridevirtual |
Definition at line 6070 of file CanBusMotionControl.cpp.
◆ getEncoderSpeedsRaw()
|
overridevirtual |
Definition at line 6058 of file CanBusMotionControl.cpp.
◆ getEncodersRaw()
|
overridevirtual |
Definition at line 6022 of file CanBusMotionControl.cpp.
◆ getEncodersTimedRaw()
|
overridevirtual |
Definition at line 7314 of file CanBusMotionControl.cpp.
◆ getEncoderTimedRaw()
|
overridevirtual |
Definition at line 7334 of file CanBusMotionControl.cpp.
◆ getFilterTypeRaw()
| bool CanBusMotionControl::getFilterTypeRaw | ( | int | j, |
| int * | type | ||
| ) |
prepare Can message.
Definition at line 5835 of file CanBusMotionControl.cpp.
◆ getFirmwareVersionRaw()
|
virtual |
Definition at line 5193 of file CanBusMotionControl.cpp.
◆ getImpedanceOffsetRaw()
|
overridevirtual |
Definition at line 4400 of file CanBusMotionControl.cpp.
◆ getImpedanceRaw()
|
overridevirtual |
IMPEDANCE CONTROL INTERFACE RAW.
Definition at line 4320 of file CanBusMotionControl.cpp.
◆ getInteractionModeRaw()
|
overridevirtual |
Definition at line 7347 of file CanBusMotionControl.cpp.
◆ getInteractionModesRaw() [1/2]
|
overridevirtual |
Definition at line 7359 of file CanBusMotionControl.cpp.
◆ getInteractionModesRaw() [2/2]
|
overridevirtual |
Definition at line 7375 of file CanBusMotionControl.cpp.
◆ getJointTypeRaw()
|
overridevirtual |
Definition at line 4213 of file CanBusMotionControl.cpp.
◆ getLastInputStamp()
|
overridevirtual |
Definition at line 6041 of file CanBusMotionControl.cpp.
◆ getLimitsRaw()
|
overridevirtual |
Definition at line 6489 of file CanBusMotionControl.cpp.
◆ getMaxCurrentRaw()
|
overridevirtual |
Definition at line 6307 of file CanBusMotionControl.cpp.
◆ getMotorEncoderAccelerationRaw()
|
overridevirtual |
Definition at line 6251 of file CanBusMotionControl.cpp.
◆ getMotorEncoderAccelerationsRaw()
|
overridevirtual |
Definition at line 6238 of file CanBusMotionControl.cpp.
◆ getMotorEncoderCountsPerRevolutionRaw()
|
overridevirtual |
Definition at line 6191 of file CanBusMotionControl.cpp.
◆ getMotorEncoderRaw()
|
overridevirtual |
Definition at line 6150 of file CanBusMotionControl.cpp.
◆ getMotorEncoderSpeedRaw()
|
overridevirtual |
Definition at line 6227 of file CanBusMotionControl.cpp.
◆ getMotorEncoderSpeedsRaw()
|
overridevirtual |
Definition at line 6215 of file CanBusMotionControl.cpp.
◆ getMotorEncodersRaw()
|
overridevirtual |
Definition at line 6131 of file CanBusMotionControl.cpp.
◆ getMotorEncodersTimedRaw()
|
overridevirtual |
Definition at line 6160 of file CanBusMotionControl.cpp.
◆ getMotorEncoderTimedRaw()
|
overridevirtual |
Definition at line 6180 of file CanBusMotionControl.cpp.
◆ getMotorTorqueParamsRaw()
|
overridevirtual |
Definition at line 5782 of file CanBusMotionControl.cpp.
◆ getNominalCurrentRaw()
|
overridevirtual |
Definition at line 6359 of file CanBusMotionControl.cpp.
◆ getNumberOfMotorEncodersRaw()
|
overridevirtual |
Definition at line 6201 of file CanBusMotionControl.cpp.
◆ getNumberOfMotorsRaw()
|
overridevirtual |
IMotor.
Definition at line 6208 of file CanBusMotionControl.cpp.
◆ getParameterRaw()
|
virtual |
Definition at line 5062 of file CanBusMotionControl.cpp.
◆ getPeakCurrentRaw()
|
overridevirtual |
Definition at line 6349 of file CanBusMotionControl.cpp.
◆ getPidErrorLimitRaw()
|
overridevirtual |
Definition at line 5334 of file CanBusMotionControl.cpp.
◆ getPidErrorLimitsRaw()
|
overridevirtual |
Definition at line 5339 of file CanBusMotionControl.cpp.
◆ getPidErrorRaw()
|
overridevirtual |
Definition at line 4933 of file CanBusMotionControl.cpp.
◆ getPidErrorsRaw()
|
overridevirtual |
Definition at line 5052 of file CanBusMotionControl.cpp.
◆ getPidOutputRaw()
|
overridevirtual |
Definition at line 5410 of file CanBusMotionControl.cpp.
◆ getPidOutputsRaw()
|
overridevirtual |
Definition at line 5438 of file CanBusMotionControl.cpp.
◆ getPidRaw()
|
overridevirtual |
Definition at line 4561 of file CanBusMotionControl.cpp.
◆ getPidReferenceRaw()
|
overridevirtual |
Definition at line 5274 of file CanBusMotionControl.cpp.
◆ getPidReferencesRaw()
|
overridevirtual |
Definition at line 5321 of file CanBusMotionControl.cpp.
◆ getPidsRaw()
|
overridevirtual |
Definition at line 4588 of file CanBusMotionControl.cpp.
◆ getPowerSupplyVoltageRaw()
|
overridevirtual |
Definition at line 6393 of file CanBusMotionControl.cpp.
◆ getPWMLimitRaw()
|
overridevirtual |
Definition at line 6374 of file CanBusMotionControl.cpp.
◆ getPWMRaw()
|
overridevirtual |
Definition at line 6369 of file CanBusMotionControl.cpp.
◆ getRefAccelerationRaw()
|
overridevirtual |
cmd is an array of double (LATER: to be optimized).
Definition at line 5726 of file CanBusMotionControl.cpp.
◆ getRefAccelerationsRaw() [1/2]
|
overridevirtual |
Definition at line 6575 of file CanBusMotionControl.cpp.
◆ getRefAccelerationsRaw() [2/2]
|
overridevirtual |
cmd is an array of double (LATER: to be optimized).
Definition at line 5705 of file CanBusMotionControl.cpp.
◆ getRefCurrentRaw()
|
overridevirtual |
Definition at line 7550 of file CanBusMotionControl.cpp.
◆ getRefCurrentsRaw()
|
overridevirtual |
Definition at line 7545 of file CanBusMotionControl.cpp.
◆ getRefDutyCycleRaw()
|
overridevirtual |
Definition at line 7457 of file CanBusMotionControl.cpp.
◆ getRefDutyCyclesRaw()
|
overridevirtual |
Definition at line 7472 of file CanBusMotionControl.cpp.
◆ getRefPositionRaw()
|
overridevirtual |
Definition at line 5022 of file CanBusMotionControl.cpp.
◆ getRefPositionsRaw() [1/2]
|
overridevirtual |
Definition at line 5042 of file CanBusMotionControl.cpp.
◆ getRefPositionsRaw() [2/2]
|
overridevirtual |
Definition at line 5031 of file CanBusMotionControl.cpp.
◆ getRefSpeedRaw()
|
overridevirtual |
Definition at line 5695 of file CanBusMotionControl.cpp.
◆ getRefSpeedsRaw() [1/2]
|
overridevirtual |
Definition at line 6565 of file CanBusMotionControl.cpp.
◆ getRefSpeedsRaw() [2/2]
|
overridevirtual |
cmd is an array of double (LATER: to be optimized).
Definition at line 5683 of file CanBusMotionControl.cpp.
◆ getRefTorqueRaw()
|
overridevirtual |
TORQUE CONTROL INTERFACE RAW.
cmd is an array of double (LATER: to be optimized).
Definition at line 5764 of file CanBusMotionControl.cpp.
◆ getRefTorquesRaw()
|
overridevirtual |
cmd is an array of double (LATER: to be optimized).
Definition at line 5745 of file CanBusMotionControl.cpp.
◆ getRefVelocitiesRaw() [1/2]
|
overridevirtual |
Definition at line 5012 of file CanBusMotionControl.cpp.
◆ getRefVelocitiesRaw() [2/2]
|
overridevirtual |
Definition at line 5001 of file CanBusMotionControl.cpp.
◆ getRefVelocityRaw()
|
overridevirtual |
Definition at line 4991 of file CanBusMotionControl.cpp.
◆ getRemoteVariableRaw()
|
overridevirtual |
Definition at line 4146 of file CanBusMotionControl.cpp.
◆ getRemoteVariablesListRaw()
|
overridevirtual |
Definition at line 4138 of file CanBusMotionControl.cpp.
◆ getTargetPositionRaw()
|
overridevirtual |
Definition at line 4960 of file CanBusMotionControl.cpp.
◆ getTargetPositionsRaw() [1/2]
|
overridevirtual |
Definition at line 4981 of file CanBusMotionControl.cpp.
◆ getTargetPositionsRaw() [2/2]
|
overridevirtual |
Definition at line 4970 of file CanBusMotionControl.cpp.
◆ getTemperatureLimitRaw()
|
overridevirtual |
Definition at line 6339 of file CanBusMotionControl.cpp.
◆ getTemperatureRaw()
|
overridevirtual |
Definition at line 6329 of file CanBusMotionControl.cpp.
◆ getTemperaturesRaw()
|
overridevirtual |
Definition at line 6334 of file CanBusMotionControl.cpp.
◆ getTorqueRangeRaw()
|
overridevirtual |
Definition at line 4890 of file CanBusMotionControl.cpp.
◆ getTorqueRangesRaw()
|
overridevirtual |
Definition at line 4928 of file CanBusMotionControl.cpp.
◆ getTorqueRaw()
|
overridevirtual |
cmd is a SingleAxis pointer with 1 double arg
Definition at line 4849 of file CanBusMotionControl.cpp.
◆ getTorquesRaw()
|
overridevirtual |
cmd is an array of double (LATER: to be optimized).
Definition at line 4879 of file CanBusMotionControl.cpp.
◆ getVelLimitsRaw()
|
overridevirtual |
Definition at line 6646 of file CanBusMotionControl.cpp.
◆ helper_getCurPidRaw()
| bool CanBusMotionControl::helper_getCurPidRaw | ( | int | j, |
| Pid * | pid | ||
| ) |
Definition at line 6616 of file CanBusMotionControl.cpp.
◆ helper_getPosPidRaw()
| bool CanBusMotionControl::helper_getPosPidRaw | ( | int | j, |
| Pid * | pid | ||
| ) |
Definition at line 4531 of file CanBusMotionControl.cpp.
◆ helper_getTrqPidRaw()
| bool CanBusMotionControl::helper_getTrqPidRaw | ( | int | j, |
| Pid * | pid | ||
| ) |
Definition at line 4646 of file CanBusMotionControl.cpp.
◆ helper_getVelPidRaw()
| bool CanBusMotionControl::helper_getVelPidRaw | ( | int | j, |
| Pid * | pid | ||
| ) |
Definition at line 6627 of file CanBusMotionControl.cpp.
◆ helper_setCurPidRaw()
| bool CanBusMotionControl::helper_setCurPidRaw | ( | int | j, |
| const Pid & | pid | ||
| ) |
Definition at line 6611 of file CanBusMotionControl.cpp.
◆ helper_setPosPidRaw()
| bool CanBusMotionControl::helper_setPosPidRaw | ( | int | j, |
| const Pid & | pid | ||
| ) |
Definition at line 4278 of file CanBusMotionControl.cpp.
◆ helper_setTrqPidRaw()
| bool CanBusMotionControl::helper_setTrqPidRaw | ( | int | j, |
| const Pid & | pid | ||
| ) |
prepare Can message.
Definition at line 4601 of file CanBusMotionControl.cpp.
◆ helper_setVelPidRaw()
| bool CanBusMotionControl::helper_setVelPidRaw | ( | int | j, |
| const Pid & | pid | ||
| ) |
Definition at line 6622 of file CanBusMotionControl.cpp.
◆ isPidEnabledRaw()
|
virtual |
Definition at line 6711 of file CanBusMotionControl.cpp.
◆ loadBootMemory()
|
virtual |
Definition at line 6716 of file CanBusMotionControl.cpp.
◆ open() [1/2]
| bool yarp::dev::CanBusMotionControl::open | ( | const CanBusMotionControlParameters & | par | ) |
Open the device driver.
- Parameters
-
par is the parameter structure
- Returns
- true/false on success/failure.
◆ open() [2/2]
|
virtual |
Open the device driver and start communication with the hardware.
- Parameters
-
config is a Searchable object containing the list of parameters.
- Returns
- true on success/failure.
◆ positionMoveRaw() [1/3]
|
overridevirtual |
Definition at line 5498 of file CanBusMotionControl.cpp.
◆ positionMoveRaw() [2/3]
|
overridevirtual |
Definition at line 6511 of file CanBusMotionControl.cpp.
◆ positionMoveRaw() [3/3]
|
overridevirtual |
◆ relativeMoveRaw() [1/3]
|
overridevirtual |
Definition at line 5517 of file CanBusMotionControl.cpp.
◆ relativeMoveRaw() [2/3]
|
overridevirtual |
Definition at line 6521 of file CanBusMotionControl.cpp.
◆ relativeMoveRaw() [3/3]
|
overridevirtual |
Definition at line 5512 of file CanBusMotionControl.cpp.
◆ resetEncoderRaw()
|
overridevirtual |
Definition at line 6001 of file CanBusMotionControl.cpp.
◆ resetEncodersRaw()
|
overridevirtual |
Definition at line 6006 of file CanBusMotionControl.cpp.
◆ resetMotorEncoderRaw()
|
overridevirtual |
Definition at line 6121 of file CanBusMotionControl.cpp.
◆ resetMotorEncodersRaw()
|
overridevirtual |
Definition at line 6126 of file CanBusMotionControl.cpp.
◆ resetPidRaw()
|
overridevirtual |
Definition at line 5354 of file CanBusMotionControl.cpp.
◆ run()
|
protectedvirtual |
reports board errors
class 0 msg.
legitimate message directed here, checks whether replies to any message.
Definition at line 3475 of file CanBusMotionControl.cpp.
◆ S_16()
|
inlineprotected |
Definition at line 1183 of file CanBusMotionControl.h.
◆ S_32()
|
inlineprotected |
Definition at line 1197 of file CanBusMotionControl.h.
◆ saveBootMemory()
|
virtual |
Definition at line 6731 of file CanBusMotionControl.cpp.
◆ setBCastMessages()
|
protected |
sets the broadcast policy for a given board (don't need to be called twice).
the parameter is a 32-bit integer: bit X = 1 -> message X = active e.g. 0x02 activates the broadcast of position information 0x04 activates the broadcast of velocity ...
Definition at line 6751 of file CanBusMotionControl.cpp.
◆ setCalibrationParametersRaw()
|
overridevirtual |
Definition at line 5614 of file CanBusMotionControl.cpp.
◆ setControlModeRaw()
|
overridevirtual |
Definition at line 4057 of file CanBusMotionControl.cpp.
◆ setControlModesRaw() [1/2]
|
overridevirtual |
Definition at line 4098 of file CanBusMotionControl.cpp.
◆ setControlModesRaw() [2/2]
|
overridevirtual |
Definition at line 4228 of file CanBusMotionControl.cpp.
◆ setDebugParameterRaw()
|
virtual |
Definition at line 5382 of file CanBusMotionControl.cpp.
◆ setDebugReferencePositionRaw()
|
virtual |
Definition at line 5401 of file CanBusMotionControl.cpp.
◆ setEncoderRaw()
|
overridevirtual |
Definition at line 5978 of file CanBusMotionControl.cpp.
◆ setEncodersRaw()
|
overridevirtual |
Definition at line 5987 of file CanBusMotionControl.cpp.
◆ setFilterTypeRaw()
| bool CanBusMotionControl::setFilterTypeRaw | ( | int | j, |
| int | type | ||
| ) |
prepare Can message.
Definition at line 5854 of file CanBusMotionControl.cpp.
◆ setImpedanceOffsetRaw()
|
overridevirtual |
Definition at line 4510 of file CanBusMotionControl.cpp.
◆ setImpedanceRaw()
|
overridevirtual |
Definition at line 4457 of file CanBusMotionControl.cpp.
◆ setInteractionModeRaw()
|
overridevirtual |
Definition at line 7390 of file CanBusMotionControl.cpp.
◆ setInteractionModesRaw() [1/2]
|
overridevirtual |
Definition at line 7405 of file CanBusMotionControl.cpp.
◆ setInteractionModesRaw() [2/2]
|
overridevirtual |
Definition at line 7418 of file CanBusMotionControl.cpp.
◆ setLimitsRaw()
|
overridevirtual |
Definition at line 6476 of file CanBusMotionControl.cpp.
◆ setMaxCurrentRaw()
|
overridevirtual |
Definition at line 6299 of file CanBusMotionControl.cpp.
◆ setMotorEncoderCountsPerRevolutionRaw()
|
overridevirtual |
Definition at line 6196 of file CanBusMotionControl.cpp.
◆ setMotorEncoderRaw()
|
overridevirtual |
Definition at line 6111 of file CanBusMotionControl.cpp.
◆ setMotorEncodersRaw()
|
overridevirtual |
Definition at line 6116 of file CanBusMotionControl.cpp.
◆ setMotorTorqueParamsRaw()
|
overridevirtual |
prepare Can message.
Definition at line 5873 of file CanBusMotionControl.cpp.
◆ setNominalCurrentRaw()
|
overridevirtual |
Definition at line 6364 of file CanBusMotionControl.cpp.
◆ setParameterRaw()
|
virtual |
Definition at line 5373 of file CanBusMotionControl.cpp.
◆ setPeakCurrentRaw()
|
overridevirtual |
Definition at line 6354 of file CanBusMotionControl.cpp.
◆ setPidErrorLimitRaw()
|
overridevirtual |
Definition at line 5344 of file CanBusMotionControl.cpp.
◆ setPidErrorLimitsRaw()
|
overridevirtual |
Definition at line 5349 of file CanBusMotionControl.cpp.
◆ setPidOffsetRaw()
|
overridevirtual |
Definition at line 5364 of file CanBusMotionControl.cpp.
◆ setPidRaw()
|
overridevirtual |
Definition at line 4293 of file CanBusMotionControl.cpp.
◆ setPidReferenceRaw()
|
overridevirtual |
cmd is a SingleAxis poitner with 1 double arg
Definition at line 4806 of file CanBusMotionControl.cpp.
◆ setPidReferencesRaw()
|
overridevirtual |
cmd is an array of double (LATER: to be optimized).
Definition at line 4812 of file CanBusMotionControl.cpp.
◆ setPidsRaw()
|
overridevirtual |
Definition at line 4791 of file CanBusMotionControl.cpp.
◆ setPositionRaw()
|
overridevirtual |
Definition at line 6657 of file CanBusMotionControl.cpp.
◆ setPositionsRaw() [1/2]
|
overridevirtual |
Definition at line 6698 of file CanBusMotionControl.cpp.
◆ setPositionsRaw() [2/2]
|
overridevirtual |
Definition at line 6685 of file CanBusMotionControl.cpp.
◆ setPrintFunction()
|
virtual |
IControlDebug Interface.
Definition at line 6444 of file CanBusMotionControl.cpp.
◆ setPWMLimitRaw()
|
overridevirtual |
Definition at line 6385 of file CanBusMotionControl.cpp.
◆ setRefAccelerationRaw()
|
overridevirtual |
Definition at line 5640 of file CanBusMotionControl.cpp.
◆ setRefAccelerationsRaw() [1/2]
|
overridevirtual |
Definition at line 5658 of file CanBusMotionControl.cpp.
◆ setRefAccelerationsRaw() [2/2]
|
overridevirtual |
Definition at line 6555 of file CanBusMotionControl.cpp.
◆ setRefCurrentRaw()
|
overridevirtual |
Definition at line 7535 of file CanBusMotionControl.cpp.
◆ setRefCurrentsRaw() [1/2]
|
overridevirtual |
Definition at line 7530 of file CanBusMotionControl.cpp.
◆ setRefCurrentsRaw() [2/2]
|
overridevirtual |
Definition at line 7540 of file CanBusMotionControl.cpp.
◆ setRefDutyCycleRaw()
|
overridevirtual |
Definition at line 7436 of file CanBusMotionControl.cpp.
◆ setRefDutyCyclesRaw()
|
overridevirtual |
Definition at line 7444 of file CanBusMotionControl.cpp.
◆ setRefSpeedRaw()
|
overridevirtual |
Definition at line 5619 of file CanBusMotionControl.cpp.
◆ setRefSpeedsRaw() [1/2]
|
overridevirtual |
Definition at line 5629 of file CanBusMotionControl.cpp.
◆ setRefSpeedsRaw() [2/2]
|
overridevirtual |
Definition at line 6545 of file CanBusMotionControl.cpp.
◆ setRefTorqueRaw()
|
overridevirtual |
cmd is a SingleAxis poitner with 1 double arg
Definition at line 4828 of file CanBusMotionControl.cpp.
◆ setRefTorquesRaw() [1/2]
|
overridevirtual |
cmd is an array of double (LATER: to be optimized).
Definition at line 4863 of file CanBusMotionControl.cpp.
◆ setRefTorquesRaw() [2/2]
|
overridevirtual |
Definition at line 4838 of file CanBusMotionControl.cpp.
◆ setRemoteVariableRaw()
|
overridevirtual |
Definition at line 4164 of file CanBusMotionControl.cpp.
◆ setServerLogger()
|
inlinevirtual |
Implements yarp::dev::IClientLogger.
Definition at line 793 of file CanBusMotionControl.h.
◆ setSpeedEstimatorShiftRaw()
| bool CanBusMotionControl::setSpeedEstimatorShiftRaw | ( | int | j, |
| double | jnt_speed, | ||
| double | jnt_acc, | ||
| double | mot_speed, | ||
| double | mot_acc | ||
| ) |
Definition at line 6398 of file CanBusMotionControl.cpp.
◆ setTemperatureLimitRaw()
|
overridevirtual |
Definition at line 6344 of file CanBusMotionControl.cpp.
◆ setTorqueSource()
|
virtual |
Definition at line 4483 of file CanBusMotionControl.cpp.
◆ setVelLimitsRaw()
|
overridevirtual |
Definition at line 6636 of file CanBusMotionControl.cpp.
◆ setVelocityShiftRaw()
| bool CanBusMotionControl::setVelocityShiftRaw | ( | int | j, |
| double | val | ||
| ) |
Definition at line 6321 of file CanBusMotionControl.cpp.
◆ setVelocityTimeoutRaw()
| bool CanBusMotionControl::setVelocityTimeoutRaw | ( | int | j, |
| double | val | ||
| ) |
Definition at line 6416 of file CanBusMotionControl.cpp.
◆ stopRaw() [1/3]
|
overridevirtual |
Definition at line 5903 of file CanBusMotionControl.cpp.
◆ stopRaw() [2/3]
|
overridevirtual |
Definition at line 6585 of file CanBusMotionControl.cpp.
◆ stopRaw() [3/3]
|
overridevirtual |
Definition at line 5896 of file CanBusMotionControl.cpp.
◆ threadInit()
|
protectedvirtual |
Definition at line 3450 of file CanBusMotionControl.cpp.
◆ threadRelease()
|
protectedvirtual |
Definition at line 3470 of file CanBusMotionControl.cpp.
◆ velocityMoveRaw() [1/3]
|
overridevirtual |
cmd is an array of double of length njoints specifying speed for each axis
Definition at line 5965 of file CanBusMotionControl.cpp.
◆ velocityMoveRaw() [2/3]
|
overridevirtual |
Definition at line 6601 of file CanBusMotionControl.cpp.
◆ velocityMoveRaw() [3/3]
|
overridevirtual |
Velocity control interface raw.
cmd is an array of double of length njoints specifying speed for each axis
prepare can message.
speed
accel
Definition at line 5919 of file CanBusMotionControl.cpp.
Member Data Documentation
◆ _axisImpedanceHelper
|
protected |
Definition at line 1158 of file CanBusMotionControl.h.
◆ _axisPositionDirectHelper
|
protected |
Definition at line 1161 of file CanBusMotionControl.h.
◆ _axisTorqueHelper
|
protected |
Definition at line 1157 of file CanBusMotionControl.h.
◆ _filter
|
protected |
filter for recurrent messages.
Definition at line 1130 of file CanBusMotionControl.h.
◆ _firmwareVersionHelper
|
protected |
Definition at line 1159 of file CanBusMotionControl.h.
◆ _last_position_move_time
|
protected |
Definition at line 1178 of file CanBusMotionControl.h.
◆ _max_vel_jnt_cmd
|
protected |
Definition at line 1175 of file CanBusMotionControl.h.
◆ _MCtorqueControlEnabled
|
protected |
Definition at line 1176 of file CanBusMotionControl.h.
◆ _mutex
|
protected |
Definition at line 1119 of file CanBusMotionControl.h.
◆ _noreply
|
protected |
Definition at line 1123 of file CanBusMotionControl.h.
◆ _opened
|
protected |
Definition at line 1124 of file CanBusMotionControl.h.
◆ _ref_accs
|
protected |
Definition at line 1171 of file CanBusMotionControl.h.
◆ _ref_command_positions
|
protected |
Definition at line 1173 of file CanBusMotionControl.h.
◆ _ref_command_speeds
|
protected |
Definition at line 1170 of file CanBusMotionControl.h.
◆ _ref_positions
|
protected |
Definition at line 1174 of file CanBusMotionControl.h.
◆ _ref_speeds
|
protected |
Definition at line 1169 of file CanBusMotionControl.h.
◆ _ref_torques
|
protected |
Definition at line 1172 of file CanBusMotionControl.h.
◆ _speedEstimationHelper
|
protected |
Definition at line 1160 of file CanBusMotionControl.h.
◆ _writerequested
|
protected |
Definition at line 1122 of file CanBusMotionControl.h.
◆ canController
|
protected |
Definition at line 1120 of file CanBusMotionControl.h.
◆ system_resources
|
protected |
Definition at line 1118 of file CanBusMotionControl.h.
◆ threadPool
|
protected |
Definition at line 1125 of file CanBusMotionControl.h.
The documentation for this class was generated from the following files:
- icub-main/src/libraries/icubmod/canBusMotionControl/CanBusMotionControl.h
- icub-main/src/libraries/icubmod/canBusMotionControl/CanBusMotionControl.cpp