embObjMotionControl : driver for iCub motor control boards EMS on a ETH bus.
More...
#include <embObjMotionControl.h>
 Inheritance diagram for yarp::dev::embObjMotionControl:
Inheritance diagram for yarp::dev::embObjMotionControl: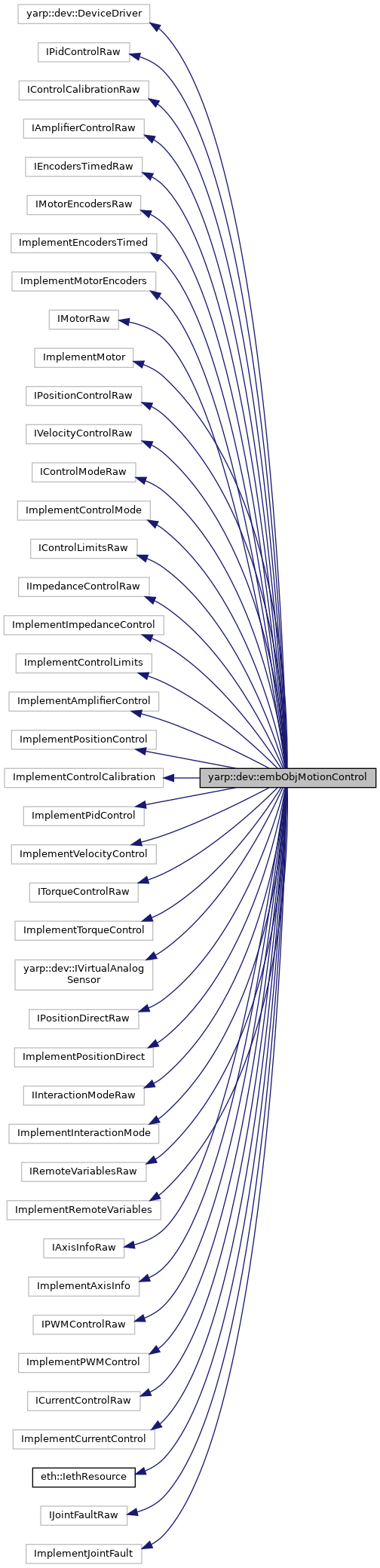
Public Member Functions | |
| embObjMotionControl () | |
| ~embObjMotionControl () | |
| virtual bool | open (yarp::os::Searchable &par) |
| virtual bool | close () |
| virtual bool | initialised () |
| virtual eth::iethresType_t | type () |
| virtual bool | update (eOprotID32_t id32, double timestamp, void *rxdata) |
| virtual bool | getEntityName (uint32_t entityId, std::string &entityName) |
| virtual bool | getEncoderTypeName (uint32_t jomoId, eOmc_position_t pos, std::string &encoderTypeName) override |
| virtual bool | getEntityControlModeName (uint32_t entityId, eOenum08_t control_mode, std::string &controlModeName, eObool_t compact_string) override |
| virtual bool | setPidRaw (const PidControlTypeEnum &pidtype, int j, const Pid &pid) override |
| virtual bool | setPidsRaw (const PidControlTypeEnum &pidtype, const Pid *pids) override |
| virtual bool | setPidReferenceRaw (const PidControlTypeEnum &pidtype, int j, double ref) override |
| virtual bool | setPidReferencesRaw (const PidControlTypeEnum &pidtype, const double *refs) override |
| virtual bool | setPidErrorLimitRaw (const PidControlTypeEnum &pidtype, int j, double limit) override |
| virtual bool | setPidErrorLimitsRaw (const PidControlTypeEnum &pidtype, const double *limits) override |
| virtual bool | getPidErrorRaw (const PidControlTypeEnum &pidtype, int j, double *err) override |
| virtual bool | getPidErrorsRaw (const PidControlTypeEnum &pidtype, double *errs) override |
| virtual bool | getPidOutputRaw (const PidControlTypeEnum &pidtype, int j, double *out) override |
| virtual bool | getPidOutputsRaw (const PidControlTypeEnum &pidtype, double *outs) override |
| virtual bool | getPidRaw (const PidControlTypeEnum &pidtype, int j, Pid *pid) override |
| virtual bool | getPidsRaw (const PidControlTypeEnum &pidtype, Pid *pids) override |
| virtual bool | getPidReferenceRaw (const PidControlTypeEnum &pidtype, int j, double *ref) override |
| virtual bool | getPidReferencesRaw (const PidControlTypeEnum &pidtype, double *refs) override |
| virtual bool | getPidErrorLimitRaw (const PidControlTypeEnum &pidtype, int j, double *limit) override |
| virtual bool | getPidErrorLimitsRaw (const PidControlTypeEnum &pidtype, double *limits) override |
| virtual bool | resetPidRaw (const PidControlTypeEnum &pidtype, int j) override |
| virtual bool | disablePidRaw (const PidControlTypeEnum &pidtype, int j) override |
| virtual bool | enablePidRaw (const PidControlTypeEnum &pidtype, int j) override |
| virtual bool | setPidOffsetRaw (const PidControlTypeEnum &pidtype, int j, double v) override |
| virtual bool | isPidEnabledRaw (const PidControlTypeEnum &pidtype, int j, bool *enabled) override |
| virtual bool | getAxes (int *ax) override |
| virtual bool | positionMoveRaw (int j, double ref) override |
| virtual bool | positionMoveRaw (const double *refs) override |
| virtual bool | relativeMoveRaw (int j, double delta) override |
| virtual bool | relativeMoveRaw (const double *deltas) override |
| virtual bool | checkMotionDoneRaw (bool *flag) override |
| virtual bool | checkMotionDoneRaw (int j, bool *flag) override |
| virtual bool | setRefSpeedRaw (int j, double sp) override |
| virtual bool | setRefSpeedsRaw (const double *spds) override |
| virtual bool | setRefAccelerationRaw (int j, double acc) override |
| virtual bool | setRefAccelerationsRaw (const double *accs) override |
| virtual bool | getRefSpeedRaw (int j, double *ref) override |
| virtual bool | getRefSpeedsRaw (double *spds) override |
| virtual bool | getRefAccelerationRaw (int j, double *acc) override |
| virtual bool | getRefAccelerationsRaw (double *accs) override |
| virtual bool | stopRaw (int j) override |
| virtual bool | stopRaw () override |
| virtual bool | positionMoveRaw (const int n_joint, const int *joints, const double *refs) override |
| virtual bool | relativeMoveRaw (const int n_joint, const int *joints, const double *deltas) override |
| virtual bool | checkMotionDoneRaw (const int n_joint, const int *joints, bool *flags) override |
| virtual bool | setRefSpeedsRaw (const int n_joint, const int *joints, const double *spds) override |
| virtual bool | setRefAccelerationsRaw (const int n_joint, const int *joints, const double *accs) override |
| virtual bool | getRefSpeedsRaw (const int n_joint, const int *joints, double *spds) override |
| virtual bool | getRefAccelerationsRaw (const int n_joint, const int *joints, double *accs) override |
| virtual bool | stopRaw (const int n_joint, const int *joints) override |
| virtual bool | getTargetPositionRaw (const int joint, double *ref) override |
| virtual bool | getTargetPositionsRaw (double *refs) override |
| virtual bool | getTargetPositionsRaw (const int n_joint, const int *joints, double *refs) override |
| virtual bool | velocityMoveRaw (int j, double sp) override |
| virtual bool | velocityMoveRaw (const double *sp) override |
| virtual bool | setCalibrationParametersRaw (int axis, const CalibrationParameters ¶ms) override |
| virtual bool | calibrateAxisWithParamsRaw (int axis, unsigned int type, double p1, double p2, double p3) override |
| virtual bool | calibrationDoneRaw (int j) override |
| virtual bool | getControlModeRaw (int j, int *v) override |
| virtual bool | getControlModesRaw (int *v) override |
| virtual bool | getControlModesRaw (const int n_joint, const int *joints, int *modes) override |
| virtual bool | setControlModeRaw (const int j, const int mode) override |
| virtual bool | setControlModesRaw (const int n_joint, const int *joints, int *modes) override |
| virtual bool | setControlModesRaw (int *modes) override |
| virtual bool | resetEncoderRaw (int j) override |
| virtual bool | resetEncodersRaw () override |
| virtual bool | setEncoderRaw (int j, double val) override |
| virtual bool | setEncodersRaw (const double *vals) override |
| virtual bool | getEncoderRaw (int j, double *v) override |
| virtual bool | getEncodersRaw (double *encs) override |
| virtual bool | getEncoderSpeedRaw (int j, double *sp) override |
| virtual bool | getEncoderSpeedsRaw (double *spds) override |
| virtual bool | getEncoderAccelerationRaw (int j, double *spds) override |
| virtual bool | getEncoderAccelerationsRaw (double *accs) override |
| virtual bool | getEncodersTimedRaw (double *encs, double *stamps) override |
| virtual bool | getEncoderTimedRaw (int j, double *encs, double *stamp) override |
| virtual bool | getNumberOfMotorEncodersRaw (int *num) override |
| virtual bool | resetMotorEncoderRaw (int m) override |
| virtual bool | resetMotorEncodersRaw () override |
| virtual bool | setMotorEncoderRaw (int m, const double val) override |
| virtual bool | setMotorEncodersRaw (const double *vals) override |
| virtual bool | getMotorEncoderRaw (int m, double *v) override |
| virtual bool | getMotorEncodersRaw (double *encs) override |
| virtual bool | getMotorEncoderSpeedRaw (int m, double *sp) override |
| virtual bool | getMotorEncoderSpeedsRaw (double *spds) override |
| virtual bool | getMotorEncoderAccelerationRaw (int m, double *spds) override |
| virtual bool | getMotorEncoderAccelerationsRaw (double *accs) override |
| virtual bool | getMotorEncodersTimedRaw (double *encs, double *stamps) override |
| virtual bool | getMotorEncoderTimedRaw (int m, double *encs, double *stamp) override |
| virtual bool | getMotorEncoderCountsPerRevolutionRaw (int m, double *v) override |
| virtual bool | setMotorEncoderCountsPerRevolutionRaw (int m, const double cpr) override |
| virtual bool | getRemoteVariableRaw (std::string key, yarp::os::Bottle &val) override |
| virtual bool | setRemoteVariableRaw (std::string key, const yarp::os::Bottle &val) override |
| virtual bool | getRemoteVariablesListRaw (yarp::os::Bottle *listOfKeys) override |
| virtual bool | getAxisNameRaw (int axis, std::string &name) override |
| virtual bool | getJointTypeRaw (int axis, yarp::dev::JointTypeEnum &type) override |
| bool | getRotorEncoderResolutionRaw (int m, double &rotres) |
| bool | getJointEncoderResolutionRaw (int m, double &jntres) |
| bool | getJointEncoderTypeRaw (int j, int &type) |
| bool | getRotorEncoderTypeRaw (int j, int &type) |
| bool | getKinematicMJRaw (int j, double &rotres) |
| bool | getTemperatureSensorTypeRaw (int j, std::string &ret) |
| bool | getHasTempSensorsRaw (int j, int &ret) |
| bool | getHasHallSensorRaw (int j, int &ret) |
| bool | getHasRotorEncoderRaw (int j, int &ret) |
| bool | getHasRotorEncoderIndexRaw (int j, int &ret) |
| bool | getMotorPolesRaw (int j, int &poles) |
| bool | getRotorIndexOffsetRaw (int j, double &rotorOffset) |
| bool | getTorqueControlFilterType (int j, int &type) |
| bool | getRotorLimitsRaw (int j, double *rotorMin, double *rotorMax) |
| bool | getWholeImpedanceRaw (int j, eOmc_impedance_t &imped) |
| virtual bool | enableAmpRaw (int j) override |
| virtual bool | disableAmpRaw (int j) override |
| virtual bool | getCurrentsRaw (double *vals) override |
| virtual bool | getCurrentRaw (int j, double *val) override |
| virtual bool | setMaxCurrentRaw (int j, double val) override |
| virtual bool | getMaxCurrentRaw (int j, double *val) override |
| virtual bool | getAmpStatusRaw (int *st) override |
| virtual bool | getAmpStatusRaw (int j, int *st) override |
| virtual bool | getPWMRaw (int j, double *val) override |
| virtual bool | getPWMLimitRaw (int j, double *val) override |
| virtual bool | setPWMLimitRaw (int j, const double val) override |
| virtual bool | getPowerSupplyVoltageRaw (int j, double *val) override |
| virtual yarp::dev::VAS_status | getVirtualAnalogSensorStatus (int ch) override |
| virtual int | getVirtualAnalogSensorChannels () override |
| virtual bool | updateVirtualAnalogSensorMeasure (yarp::sig::Vector &fTorques) override |
| virtual bool | updateVirtualAnalogSensorMeasure (int j, double &fTorque) override |
| virtual bool | setLimitsRaw (int axis, double min, double max) override |
| virtual bool | getLimitsRaw (int axis, double *min, double *max) override |
| virtual bool | setVelLimitsRaw (int axis, double min, double max) override |
| virtual bool | getVelLimitsRaw (int axis, double *min, double *max) override |
| virtual bool | getTorqueRaw (int j, double *t) override |
| virtual bool | getTorquesRaw (double *t) override |
| virtual bool | getTorqueRangeRaw (int j, double *min, double *max) override |
| virtual bool | getTorqueRangesRaw (double *min, double *max) override |
| virtual bool | setRefTorquesRaw (const double *t) override |
| virtual bool | setRefTorqueRaw (int j, double t) override |
| virtual bool | setRefTorquesRaw (const int n_joint, const int *joints, const double *t) override |
| virtual bool | getRefTorquesRaw (double *t) override |
| virtual bool | getRefTorqueRaw (int j, double *t) override |
| virtual bool | getMotorTorqueParamsRaw (int j, MotorTorqueParameters *params) override |
| virtual bool | setMotorTorqueParamsRaw (int j, const MotorTorqueParameters params) override |
| virtual bool | velocityMoveRaw (const int n_joint, const int *joints, const double *spds) override |
| virtual bool | getRefVelocityRaw (const int joint, double *ref) override |
| virtual bool | getRefVelocitiesRaw (double *refs) override |
| virtual bool | getRefVelocitiesRaw (const int n_joint, const int *joints, double *refs) override |
| virtual bool | getImpedanceRaw (int j, double *stiffness, double *damping) override |
| virtual bool | setImpedanceRaw (int j, double stiffness, double damping) override |
| virtual bool | setImpedanceOffsetRaw (int j, double offset) override |
| virtual bool | getImpedanceOffsetRaw (int j, double *offset) override |
| virtual bool | getCurrentImpedanceLimitRaw (int j, double *min_stiff, double *max_stiff, double *min_damp, double *max_damp) override |
| virtual bool | setPositionRaw (int j, double ref) override |
| virtual bool | setPositionsRaw (const int n_joint, const int *joints, const double *refs) override |
| virtual bool | setPositionsRaw (const double *refs) override |
| virtual bool | getRefPositionRaw (const int joint, double *ref) override |
| virtual bool | getRefPositionsRaw (double *refs) override |
| virtual bool | getRefPositionsRaw (const int n_joint, const int *joints, double *refs) override |
| virtual bool | getInteractionModeRaw (int j, yarp::dev::InteractionModeEnum *_mode) override |
| virtual bool | getInteractionModesRaw (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| virtual bool | getInteractionModesRaw (yarp::dev::InteractionModeEnum *modes) override |
| virtual bool | setInteractionModeRaw (int j, yarp::dev::InteractionModeEnum _mode) override |
| virtual bool | setInteractionModesRaw (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| virtual bool | setInteractionModesRaw (yarp::dev::InteractionModeEnum *modes) override |
| virtual bool | getNumberOfMotorsRaw (int *num) override |
| virtual bool | getTemperatureRaw (int m, double *val) override |
| virtual bool | getTemperaturesRaw (double *vals) override |
| virtual bool | getTemperatureLimitRaw (int m, double *temp) override |
| virtual bool | setTemperatureLimitRaw (int m, const double temp) override |
| virtual bool | getPeakCurrentRaw (int m, double *val) override |
| virtual bool | setPeakCurrentRaw (int m, const double val) override |
| virtual bool | getNominalCurrentRaw (int m, double *val) override |
| virtual bool | setNominalCurrentRaw (int m, const double val) override |
| virtual bool | getGearboxRatioRaw (int m, double *gearbox) override |
| virtual bool | setRefDutyCycleRaw (int j, double v) override |
| virtual bool | setRefDutyCyclesRaw (const double *v) override |
| virtual bool | getRefDutyCycleRaw (int j, double *v) override |
| virtual bool | getRefDutyCyclesRaw (double *v) override |
| virtual bool | getDutyCycleRaw (int j, double *v) override |
| virtual bool | getDutyCyclesRaw (double *v) override |
| virtual bool | getCurrentRangeRaw (int j, double *min, double *max) override |
| virtual bool | getCurrentRangesRaw (double *min, double *max) override |
| virtual bool | setRefCurrentsRaw (const double *t) override |
| virtual bool | setRefCurrentRaw (int j, double t) override |
| virtual bool | setRefCurrentsRaw (const int n_joint, const int *joints, const double *t) override |
| virtual bool | getRefCurrentsRaw (double *t) override |
| virtual bool | getRefCurrentRaw (int j, double *t) override |
| virtual bool | getLastJointFaultRaw (int j, int &fault, std::string &message) override |
| virtual bool | getRawDataMap (std::map< std::string, std::vector< std::int32_t > > &map) override |
| virtual bool | getRawData (std::string key, std::vector< std::int32_t > &data) override |
| virtual bool | getKeys (std::vector< std::string > &keys) override |
| virtual int | getNumberOfKeys () override |
| virtual bool | getMetadataMap (rawValuesKeyMetadataMap &metamap) override |
| virtual bool | getKeyMetadata (std::string key, rawValuesKeyMetadata &meta) override |
| virtual bool | getAxesNames (std::string key, std::vector< std::string > &axesNames) override |
| Public Member Functions inherited from eth::IethResource | |
| virtual | ~IethResource () |
| const char * | stringOfType () |
Detailed Description
embObjMotionControl : driver for iCub motor control boards EMS on a ETH bus.
This device contains code which handles communication to the motor control boards (EMS) on the internal ethernet network of the ETH iCub. It converts requests from function calls into ETH bus messages for the motor control boards. A thread monitors the bus for incoming messages and dispatches replies to calling threads.
For the description of the parameters supported by this device, please check the template configuration file available in robotology/robots-configuration, i.e. https://github.com/robotology/robots-configuration/blob/master/iCubTemplates/iCubTemplateV4_0/hardware/motorControl/body_part–ebX-jA_B-mc.xml .
| YARP device name |
|---|
embObjMotionControl |
Definition at line 230 of file embObjMotionControl.h.
Constructor & Destructor Documentation
◆ embObjMotionControl()
| embObjMotionControl::embObjMotionControl | ( | ) |
Definition at line 188 of file embObjMotionControl.cpp.
◆ ~embObjMotionControl()
| embObjMotionControl::~embObjMotionControl | ( | ) |
Definition at line 295 of file embObjMotionControl.cpp.
Member Function Documentation
◆ calibrateAxisWithParamsRaw()
|
overridevirtual |
Definition at line 2426 of file embObjMotionControl.cpp.
◆ calibrationDoneRaw()
|
overridevirtual |
Definition at line 2503 of file embObjMotionControl.cpp.
◆ checkMotionDoneRaw() [1/3]
|
overridevirtual |
Definition at line 2638 of file embObjMotionControl.cpp.
◆ checkMotionDoneRaw() [2/3]
|
overridevirtual |
Definition at line 2792 of file embObjMotionControl.cpp.
◆ checkMotionDoneRaw() [3/3]
|
overridevirtual |
Definition at line 2620 of file embObjMotionControl.cpp.
◆ close()
|
virtual |
Definition at line 1582 of file embObjMotionControl.cpp.
◆ disableAmpRaw()
|
overridevirtual |
Definition at line 3301 of file embObjMotionControl.cpp.
◆ disablePidRaw()
|
overridevirtual |
Definition at line 2184 of file embObjMotionControl.cpp.
◆ enableAmpRaw()
|
overridevirtual |
Definition at line 3296 of file embObjMotionControl.cpp.
◆ enablePidRaw()
|
overridevirtual |
Definition at line 2189 of file embObjMotionControl.cpp.
◆ getAmpStatusRaw() [1/2]
|
overridevirtual |
Definition at line 3370 of file embObjMotionControl.cpp.
◆ getAmpStatusRaw() [2/2]
|
overridevirtual |
Definition at line 3363 of file embObjMotionControl.cpp.
◆ getAxes()
|
overridevirtual |
Definition at line 2557 of file embObjMotionControl.cpp.
◆ getAxesNames()
|
overridevirtual |
Implements iCub::debugLibrary::IRawValuesPublisher.
Definition at line 5751 of file embObjMotionControl.cpp.
◆ getAxisNameRaw()
|
overridevirtual |
Definition at line 3635 of file embObjMotionControl.cpp.
◆ getControlModeRaw()
|
overridevirtual |
Definition at line 2880 of file embObjMotionControl.cpp.
◆ getControlModesRaw() [1/2]
|
overridevirtual |
Definition at line 2904 of file embObjMotionControl.cpp.
◆ getControlModesRaw() [2/2]
|
overridevirtual |
Definition at line 2894 of file embObjMotionControl.cpp.
◆ getCurrentImpedanceLimitRaw()
|
overridevirtual |
Definition at line 4363 of file embObjMotionControl.cpp.
◆ getCurrentRangeRaw()
|
overridevirtual |
Definition at line 5364 of file embObjMotionControl.cpp.
◆ getCurrentRangesRaw()
|
overridevirtual |
Definition at line 5374 of file embObjMotionControl.cpp.
◆ getCurrentRaw()
|
overridevirtual |
Definition at line 3306 of file embObjMotionControl.cpp.
◆ getCurrentsRaw()
|
overridevirtual |
Definition at line 3316 of file embObjMotionControl.cpp.
◆ getDutyCycleRaw()
|
overridevirtual |
Definition at line 5333 of file embObjMotionControl.cpp.
◆ getDutyCyclesRaw()
|
overridevirtual |
Definition at line 5352 of file embObjMotionControl.cpp.
◆ getEncoderAccelerationRaw()
|
overridevirtual |
Definition at line 3112 of file embObjMotionControl.cpp.
◆ getEncoderAccelerationsRaw()
|
overridevirtual |
Definition at line 3125 of file embObjMotionControl.cpp.
◆ getEncoderRaw()
|
overridevirtual |
Definition at line 3057 of file embObjMotionControl.cpp.
◆ getEncoderSpeedRaw()
|
overridevirtual |
Definition at line 3088 of file embObjMotionControl.cpp.
◆ getEncoderSpeedsRaw()
|
overridevirtual |
Definition at line 3102 of file embObjMotionControl.cpp.
◆ getEncodersRaw()
|
overridevirtual |
Definition at line 3077 of file embObjMotionControl.cpp.
◆ getEncodersTimedRaw()
|
overridevirtual |
Definition at line 3137 of file embObjMotionControl.cpp.
◆ getEncoderTimedRaw()
|
overridevirtual |
Definition at line 3146 of file embObjMotionControl.cpp.
◆ getEncoderTypeName()
|
overridevirtual |
Reimplemented from eth::IethResource.
Definition at line 1803 of file embObjMotionControl.cpp.
◆ getEntityControlModeName()
|
overridevirtual |
Reimplemented from eth::IethResource.
Definition at line 1834 of file embObjMotionControl.cpp.
◆ getEntityName()
|
virtual |
Reimplemented from eth::IethResource.
Definition at line 1788 of file embObjMotionControl.cpp.
◆ getGearboxRatioRaw()
|
overridevirtual |
Definition at line 3429 of file embObjMotionControl.cpp.
◆ getHasHallSensorRaw()
| bool embObjMotionControl::getHasHallSensorRaw | ( | int | j, |
| int & | ret | ||
| ) |
Definition at line 3564 of file embObjMotionControl.cpp.
◆ getHasRotorEncoderIndexRaw()
| bool embObjMotionControl::getHasRotorEncoderIndexRaw | ( | int | j, |
| int & | ret | ||
| ) |
Definition at line 3592 of file embObjMotionControl.cpp.
◆ getHasRotorEncoderRaw()
| bool embObjMotionControl::getHasRotorEncoderRaw | ( | int | j, |
| int & | ret | ||
| ) |
Definition at line 3578 of file embObjMotionControl.cpp.
◆ getHasTempSensorsRaw()
| bool embObjMotionControl::getHasTempSensorsRaw | ( | int | j, |
| int & | ret | ||
| ) |
Definition at line 3550 of file embObjMotionControl.cpp.
◆ getImpedanceOffsetRaw()
|
overridevirtual |
Definition at line 4352 of file embObjMotionControl.cpp.
◆ getImpedanceRaw()
|
overridevirtual |
Definition at line 4276 of file embObjMotionControl.cpp.
◆ getInteractionModeRaw()
|
overridevirtual |
Definition at line 4710 of file embObjMotionControl.cpp.
◆ getInteractionModesRaw() [1/2]
|
overridevirtual |
Definition at line 4727 of file embObjMotionControl.cpp.
◆ getInteractionModesRaw() [2/2]
|
overridevirtual |
Definition at line 4738 of file embObjMotionControl.cpp.
◆ getJointEncoderResolutionRaw()
| bool embObjMotionControl::getJointEncoderResolutionRaw | ( | int | m, |
| double & | jntres | ||
| ) |
Definition at line 3482 of file embObjMotionControl.cpp.
◆ getJointEncoderTypeRaw()
| bool embObjMotionControl::getJointEncoderTypeRaw | ( | int | j, |
| int & | type | ||
| ) |
Definition at line 3496 of file embObjMotionControl.cpp.
◆ getJointTypeRaw()
|
overridevirtual |
Definition at line 3649 of file embObjMotionControl.cpp.
◆ getKeyMetadata()
|
overridevirtual |
Implements iCub::debugLibrary::IRawValuesPublisher.
Definition at line 5735 of file embObjMotionControl.cpp.
◆ getKeys()
|
overridevirtual |
Implements iCub::debugLibrary::IRawValuesPublisher.
Definition at line 5709 of file embObjMotionControl.cpp.
◆ getKinematicMJRaw()
| bool embObjMotionControl::getKinematicMJRaw | ( | int | j, |
| double & | rotres | ||
| ) |
Definition at line 3524 of file embObjMotionControl.cpp.
◆ getLastJointFaultRaw()
|
overridevirtual |
Definition at line 5624 of file embObjMotionControl.cpp.
◆ getLimitsRaw()
|
overridevirtual |
Definition at line 3415 of file embObjMotionControl.cpp.
◆ getMaxCurrentRaw()
|
overridevirtual |
Definition at line 3345 of file embObjMotionControl.cpp.
◆ getMetadataMap()
|
overridevirtual |
Implements iCub::debugLibrary::IRawValuesPublisher.
Definition at line 5724 of file embObjMotionControl.cpp.
◆ getMotorEncoderAccelerationRaw()
|
overridevirtual |
Definition at line 3249 of file embObjMotionControl.cpp.
◆ getMotorEncoderAccelerationsRaw()
|
overridevirtual |
Definition at line 3266 of file embObjMotionControl.cpp.
◆ getMotorEncoderCountsPerRevolutionRaw()
|
overridevirtual |
Definition at line 3177 of file embObjMotionControl.cpp.
◆ getMotorEncoderRaw()
|
overridevirtual |
Definition at line 3192 of file embObjMotionControl.cpp.
◆ getMotorEncoderSpeedRaw()
|
overridevirtual |
Definition at line 3222 of file embObjMotionControl.cpp.
◆ getMotorEncoderSpeedsRaw()
|
overridevirtual |
Definition at line 3239 of file embObjMotionControl.cpp.
◆ getMotorEncodersRaw()
|
overridevirtual |
Definition at line 3211 of file embObjMotionControl.cpp.
◆ getMotorEncodersTimedRaw()
|
overridevirtual |
Definition at line 3276 of file embObjMotionControl.cpp.
◆ getMotorEncoderTimedRaw()
|
overridevirtual |
Definition at line 3285 of file embObjMotionControl.cpp.
◆ getMotorPolesRaw()
| bool embObjMotionControl::getMotorPolesRaw | ( | int | j, |
| int & | poles | ||
| ) |
Definition at line 3606 of file embObjMotionControl.cpp.
◆ getMotorTorqueParamsRaw()
|
overridevirtual |
Definition at line 4372 of file embObjMotionControl.cpp.
◆ getNominalCurrentRaw()
|
overridevirtual |
Definition at line 5050 of file embObjMotionControl.cpp.
◆ getNumberOfKeys()
|
overridevirtual |
Implements iCub::debugLibrary::IRawValuesPublisher.
Definition at line 5719 of file embObjMotionControl.cpp.
◆ getNumberOfMotorEncodersRaw()
|
overridevirtual |
Definition at line 3156 of file embObjMotionControl.cpp.
◆ getNumberOfMotorsRaw()
|
overridevirtual |
Definition at line 4956 of file embObjMotionControl.cpp.
◆ getPeakCurrentRaw()
|
overridevirtual |
Definition at line 5010 of file embObjMotionControl.cpp.
◆ getPidErrorLimitRaw()
|
overridevirtual |
Definition at line 2169 of file embObjMotionControl.cpp.
◆ getPidErrorLimitsRaw()
|
overridevirtual |
Definition at line 2174 of file embObjMotionControl.cpp.
◆ getPidErrorRaw()
|
overridevirtual |
Definition at line 1954 of file embObjMotionControl.cpp.
◆ getPidErrorsRaw()
|
overridevirtual |
Definition at line 2018 of file embObjMotionControl.cpp.
◆ getPidOutputRaw()
|
overridevirtual |
Definition at line 4902 of file embObjMotionControl.cpp.
◆ getPidOutputsRaw()
|
overridevirtual |
Definition at line 4941 of file embObjMotionControl.cpp.
◆ getPidRaw()
|
overridevirtual |
Definition at line 1875 of file embObjMotionControl.cpp.
◆ getPidReferenceRaw()
|
overridevirtual |
Definition at line 2103 of file embObjMotionControl.cpp.
◆ getPidReferencesRaw()
|
overridevirtual |
Definition at line 2156 of file embObjMotionControl.cpp.
◆ getPidsRaw()
|
overridevirtual |
Definition at line 2077 of file embObjMotionControl.cpp.
◆ getPowerSupplyVoltageRaw()
|
overridevirtual |
Definition at line 5143 of file embObjMotionControl.cpp.
◆ getPWMLimitRaw()
|
overridevirtual |
Definition at line 5111 of file embObjMotionControl.cpp.
◆ getPWMRaw()
|
overridevirtual |
Definition at line 5092 of file embObjMotionControl.cpp.
◆ getRawData()
|
overridevirtual |
Implements iCub::debugLibrary::IRawValuesPublisher.
Definition at line 5694 of file embObjMotionControl.cpp.
◆ getRawDataMap()
|
overridevirtual |
Implements iCub::debugLibrary::IRawValuesPublisher.
Definition at line 5679 of file embObjMotionControl.cpp.
◆ getRefAccelerationRaw()
|
overridevirtual |
Definition at line 2736 of file embObjMotionControl.cpp.
◆ getRefAccelerationsRaw() [1/2]
|
overridevirtual |
Definition at line 2856 of file embObjMotionControl.cpp.
◆ getRefAccelerationsRaw() [2/2]
|
overridevirtual |
Definition at line 2742 of file embObjMotionControl.cpp.
◆ getRefCurrentRaw()
|
overridevirtual |
Definition at line 5432 of file embObjMotionControl.cpp.
◆ getRefCurrentsRaw()
|
overridevirtual |
Definition at line 5416 of file embObjMotionControl.cpp.
◆ getRefDutyCycleRaw()
|
overridevirtual |
Definition at line 5298 of file embObjMotionControl.cpp.
◆ getRefDutyCyclesRaw()
|
overridevirtual |
Definition at line 5317 of file embObjMotionControl.cpp.
◆ getRefPositionRaw()
|
overridevirtual |
Definition at line 4652 of file embObjMotionControl.cpp.
◆ getRefPositionsRaw() [1/2]
|
overridevirtual |
Definition at line 4696 of file embObjMotionControl.cpp.
◆ getRefPositionsRaw() [2/2]
|
overridevirtual |
Definition at line 4675 of file embObjMotionControl.cpp.
◆ getRefSpeedRaw()
|
overridevirtual |
Definition at line 2718 of file embObjMotionControl.cpp.
◆ getRefSpeedsRaw() [1/2]
|
overridevirtual |
Definition at line 2846 of file embObjMotionControl.cpp.
◆ getRefSpeedsRaw() [2/2]
|
overridevirtual |
Definition at line 2730 of file embObjMotionControl.cpp.
◆ getRefTorqueRaw()
|
overridevirtual |
Definition at line 4207 of file embObjMotionControl.cpp.
◆ getRefTorquesRaw()
|
overridevirtual |
Definition at line 4199 of file embObjMotionControl.cpp.
◆ getRefVelocitiesRaw() [1/2]
|
overridevirtual |
Definition at line 4634 of file embObjMotionControl.cpp.
◆ getRefVelocitiesRaw() [2/2]
|
overridevirtual |
Definition at line 4609 of file embObjMotionControl.cpp.
◆ getRefVelocityRaw()
|
overridevirtual |
Definition at line 4586 of file embObjMotionControl.cpp.
◆ getRemoteVariableRaw()
|
overridevirtual |
Definition at line 3677 of file embObjMotionControl.cpp.
◆ getRemoteVariablesListRaw()
|
overridevirtual |
Definition at line 4028 of file embObjMotionControl.cpp.
◆ getRotorEncoderResolutionRaw()
| bool embObjMotionControl::getRotorEncoderResolutionRaw | ( | int | m, |
| double & | rotres | ||
| ) |
Definition at line 3468 of file embObjMotionControl.cpp.
◆ getRotorEncoderTypeRaw()
| bool embObjMotionControl::getRotorEncoderTypeRaw | ( | int | j, |
| int & | type | ||
| ) |
Definition at line 3510 of file embObjMotionControl.cpp.
◆ getRotorIndexOffsetRaw()
| bool embObjMotionControl::getRotorIndexOffsetRaw | ( | int | j, |
| double & | rotorOffset | ||
| ) |
Definition at line 3621 of file embObjMotionControl.cpp.
◆ getRotorLimitsRaw()
| bool embObjMotionControl::getRotorLimitsRaw | ( | int | j, |
| double * | rotorMin, | ||
| double * | rotorMax | ||
| ) |
Definition at line 3443 of file embObjMotionControl.cpp.
◆ getTargetPositionRaw()
|
overridevirtual |
Definition at line 4541 of file embObjMotionControl.cpp.
◆ getTargetPositionsRaw() [1/2]
|
overridevirtual |
Definition at line 4576 of file embObjMotionControl.cpp.
◆ getTargetPositionsRaw() [2/2]
|
overridevirtual |
Definition at line 4566 of file embObjMotionControl.cpp.
◆ getTemperatureLimitRaw()
|
overridevirtual |
Definition at line 4995 of file embObjMotionControl.cpp.
◆ getTemperatureRaw()
|
overridevirtual |
Definition at line 4962 of file embObjMotionControl.cpp.
◆ getTemperatureSensorTypeRaw()
| bool embObjMotionControl::getTemperatureSensorTypeRaw | ( | int | j, |
| std::string & | ret | ||
| ) |
Definition at line 3530 of file embObjMotionControl.cpp.
◆ getTemperaturesRaw()
|
overridevirtual |
Definition at line 4985 of file embObjMotionControl.cpp.
◆ getTorqueControlFilterType()
| bool embObjMotionControl::getTorqueControlFilterType | ( | int | j, |
| int & | type | ||
| ) |
Definition at line 3455 of file embObjMotionControl.cpp.
◆ getTorqueRangeRaw()
|
overridevirtual |
Definition at line 4161 of file embObjMotionControl.cpp.
◆ getTorqueRangesRaw()
|
overridevirtual |
Definition at line 4166 of file embObjMotionControl.cpp.
◆ getTorqueRaw()
|
overridevirtual |
Definition at line 4144 of file embObjMotionControl.cpp.
◆ getTorquesRaw()
|
overridevirtual |
Definition at line 4153 of file embObjMotionControl.cpp.
◆ getVelLimitsRaw()
|
overridevirtual |
Definition at line 4078 of file embObjMotionControl.cpp.
◆ getVirtualAnalogSensorChannels()
|
overridevirtual |
Definition at line 4105 of file embObjMotionControl.cpp.
◆ getVirtualAnalogSensorStatus()
|
overridevirtual |
Definition at line 4100 of file embObjMotionControl.cpp.
◆ getWholeImpedanceRaw()
| bool embObjMotionControl::getWholeImpedanceRaw | ( | int | j, |
| eOmc_impedance_t & | imped | ||
| ) |
Definition at line 4289 of file embObjMotionControl.cpp.
◆ initialised()
|
virtual |
Implements eth::IethResource.
Definition at line 315 of file embObjMotionControl.cpp.
◆ isPidEnabledRaw()
|
overridevirtual |
Definition at line 4951 of file embObjMotionControl.cpp.
◆ open()
|
virtual |
Definition at line 347 of file embObjMotionControl.cpp.
◆ positionMoveRaw() [1/3]
|
overridevirtual |
Definition at line 2598 of file embObjMotionControl.cpp.
◆ positionMoveRaw() [2/3]
|
overridevirtual |
Definition at line 2772 of file embObjMotionControl.cpp.
◆ positionMoveRaw() [3/3]
|
overridevirtual |
Definition at line 2564 of file embObjMotionControl.cpp.
◆ relativeMoveRaw() [1/3]
|
overridevirtual |
Definition at line 2614 of file embObjMotionControl.cpp.
◆ relativeMoveRaw() [2/3]
|
overridevirtual |
Definition at line 2782 of file embObjMotionControl.cpp.
◆ relativeMoveRaw() [3/3]
|
overridevirtual |
Definition at line 2609 of file embObjMotionControl.cpp.
◆ resetEncoderRaw()
|
overridevirtual |
Definition at line 3047 of file embObjMotionControl.cpp.
◆ resetEncodersRaw()
|
overridevirtual |
Definition at line 3052 of file embObjMotionControl.cpp.
◆ resetMotorEncoderRaw()
|
overridevirtual |
Definition at line 3182 of file embObjMotionControl.cpp.
◆ resetMotorEncodersRaw()
|
overridevirtual |
Definition at line 3187 of file embObjMotionControl.cpp.
◆ resetPidRaw()
|
overridevirtual |
Definition at line 2179 of file embObjMotionControl.cpp.
◆ setCalibrationParametersRaw()
|
overridevirtual |
Definition at line 2257 of file embObjMotionControl.cpp.
◆ setControlModeRaw()
|
overridevirtual |
Definition at line 2919 of file embObjMotionControl.cpp.
◆ setControlModesRaw() [1/2]
|
overridevirtual |
Definition at line 2955 of file embObjMotionControl.cpp.
◆ setControlModesRaw() [2/2]
|
overridevirtual |
Definition at line 2993 of file embObjMotionControl.cpp.
◆ setEncoderRaw()
|
overridevirtual |
Definition at line 3037 of file embObjMotionControl.cpp.
◆ setEncodersRaw()
|
overridevirtual |
Definition at line 3042 of file embObjMotionControl.cpp.
◆ setImpedanceOffsetRaw()
|
overridevirtual |
Definition at line 4330 of file embObjMotionControl.cpp.
◆ setImpedanceRaw()
|
overridevirtual |
Definition at line 4305 of file embObjMotionControl.cpp.
◆ setInteractionModeRaw()
|
overridevirtual |
Definition at line 4750 of file embObjMotionControl.cpp.
◆ setInteractionModesRaw() [1/2]
|
overridevirtual |
Definition at line 4790 of file embObjMotionControl.cpp.
◆ setInteractionModesRaw() [2/2]
|
overridevirtual |
Definition at line 4844 of file embObjMotionControl.cpp.
◆ setLimitsRaw()
|
overridevirtual |
Definition at line 3396 of file embObjMotionControl.cpp.
◆ setMaxCurrentRaw()
|
overridevirtual |
Definition at line 3326 of file embObjMotionControl.cpp.
◆ setMotorEncoderCountsPerRevolutionRaw()
|
overridevirtual |
Definition at line 3172 of file embObjMotionControl.cpp.
◆ setMotorEncoderRaw()
|
overridevirtual |
Definition at line 3162 of file embObjMotionControl.cpp.
◆ setMotorEncodersRaw()
|
overridevirtual |
Definition at line 3167 of file embObjMotionControl.cpp.
◆ setMotorTorqueParamsRaw()
|
overridevirtual |
Definition at line 4396 of file embObjMotionControl.cpp.
◆ setNominalCurrentRaw()
|
overridevirtual |
Definition at line 5066 of file embObjMotionControl.cpp.
◆ setPeakCurrentRaw()
|
overridevirtual |
Definition at line 5026 of file embObjMotionControl.cpp.
◆ setPidErrorLimitRaw()
|
overridevirtual |
Definition at line 1942 of file embObjMotionControl.cpp.
◆ setPidErrorLimitsRaw()
|
overridevirtual |
Definition at line 1948 of file embObjMotionControl.cpp.
◆ setPidOffsetRaw()
|
overridevirtual |
Definition at line 2194 of file embObjMotionControl.cpp.
◆ setPidRaw()
|
overridevirtual |
Definition at line 1851 of file embObjMotionControl.cpp.
◆ setPidReferenceRaw()
|
overridevirtual |
Definition at line 1927 of file embObjMotionControl.cpp.
◆ setPidReferencesRaw()
|
overridevirtual |
Definition at line 1932 of file embObjMotionControl.cpp.
◆ setPidsRaw()
|
overridevirtual |
Definition at line 1917 of file embObjMotionControl.cpp.
◆ setPositionRaw()
|
overridevirtual |
Definition at line 4495 of file embObjMotionControl.cpp.
◆ setPositionsRaw() [1/2]
|
overridevirtual |
Definition at line 4530 of file embObjMotionControl.cpp.
◆ setPositionsRaw() [2/2]
|
overridevirtual |
Definition at line 4520 of file embObjMotionControl.cpp.
◆ setPWMLimitRaw()
|
overridevirtual |
Definition at line 5131 of file embObjMotionControl.cpp.
◆ setRefAccelerationRaw()
|
overridevirtual |
Definition at line 2675 of file embObjMotionControl.cpp.
◆ setRefAccelerationsRaw() [1/2]
|
overridevirtual |
Definition at line 2696 of file embObjMotionControl.cpp.
◆ setRefAccelerationsRaw() [2/2]
|
overridevirtual |
Definition at line 2836 of file embObjMotionControl.cpp.
◆ setRefCurrentRaw()
|
overridevirtual |
Definition at line 5394 of file embObjMotionControl.cpp.
◆ setRefCurrentsRaw() [1/2]
|
overridevirtual |
Definition at line 5384 of file embObjMotionControl.cpp.
◆ setRefCurrentsRaw() [2/2]
|
overridevirtual |
Definition at line 5406 of file embObjMotionControl.cpp.
◆ setRefDutyCycleRaw()
|
overridevirtual |
Definition at line 5276 of file embObjMotionControl.cpp.
◆ setRefDutyCyclesRaw()
|
overridevirtual |
Definition at line 5288 of file embObjMotionControl.cpp.
◆ setRefSpeedRaw()
|
overridevirtual |
Definition at line 2655 of file embObjMotionControl.cpp.
◆ setRefSpeedsRaw() [1/2]
|
overridevirtual |
Definition at line 2664 of file embObjMotionControl.cpp.
◆ setRefSpeedsRaw() [2/2]
|
overridevirtual |
Definition at line 2826 of file embObjMotionControl.cpp.
◆ setRefTorqueRaw()
|
overridevirtual |
Definition at line 4179 of file embObjMotionControl.cpp.
◆ setRefTorquesRaw() [1/2]
|
overridevirtual |
Definition at line 4171 of file embObjMotionControl.cpp.
◆ setRefTorquesRaw() [2/2]
|
overridevirtual |
Definition at line 4189 of file embObjMotionControl.cpp.
◆ setRemoteVariableRaw()
|
overridevirtual |
Definition at line 3973 of file embObjMotionControl.cpp.
◆ setTemperatureLimitRaw()
|
overridevirtual |
Definition at line 5002 of file embObjMotionControl.cpp.
◆ setVelLimitsRaw()
|
overridevirtual |
Definition at line 4073 of file embObjMotionControl.cpp.
◆ stopRaw() [1/3]
|
overridevirtual |
Definition at line 2757 of file embObjMotionControl.cpp.
◆ stopRaw() [2/3]
|
overridevirtual |
Definition at line 2866 of file embObjMotionControl.cpp.
◆ stopRaw() [3/3]
|
overridevirtual |
Definition at line 2748 of file embObjMotionControl.cpp.
◆ type()
|
virtual |
Implements eth::IethResource.
Definition at line 1648 of file embObjMotionControl.cpp.
◆ update()
|
virtual |
Implements eth::IethResource.
Definition at line 1653 of file embObjMotionControl.cpp.
◆ updateVirtualAnalogSensorMeasure() [1/2]
|
overridevirtual |
Definition at line 4121 of file embObjMotionControl.cpp.
◆ updateVirtualAnalogSensorMeasure() [2/2]
|
overridevirtual |
Definition at line 4110 of file embObjMotionControl.cpp.
◆ velocityMoveRaw() [1/3]
|
overridevirtual |
Definition at line 2237 of file embObjMotionControl.cpp.
◆ velocityMoveRaw() [2/3]
|
overridevirtual |
Definition at line 4424 of file embObjMotionControl.cpp.
◆ velocityMoveRaw() [3/3]
|
overridevirtual |
Definition at line 2203 of file embObjMotionControl.cpp.
The documentation for this class was generated from the following files:
- icub-main/src/libraries/icubmod/embObjMotionControl/embObjMotionControl.h
- icub-main/src/libraries/icubmod/embObjMotionControl/embObjMotionControl.cpp