A collection of debug methods useful to send raw commands directly to the control boards. More...
 Include dependency graph for DebugInterfaces.h:
Include dependency graph for DebugInterfaces.h: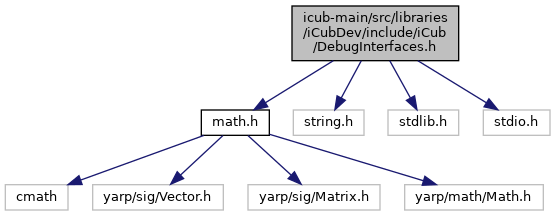 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: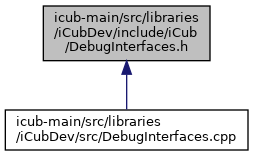
Go to the source code of this file.
Classes | |
| class | ControlBoardHelper2 |
| class | yarp::dev::IDebugInterface |
| Debug Interface. More... | |
| class | yarp::dev::IDebugInterfaceRaw |
| class | yarp::dev::ImplementDebugInterface |
Namespaces | |
| namespace | yarp |
| Copyright (C) 2008 RobotCub Consortium. | |
| namespace | yarp::dev |
Macros | |
| #define | VOCAB_GENERIC_PARAMETER yarp::os::createVocab32('g','e','n','p') |
| #define | VOCAB_DEBUG_PARAMETER yarp::os::createVocab32('d','b','g','p') |
| #define | _YARP_ASSERT_DEBUG(x) { if (!(x)) { printf("memory allocation failure\n"); /*yarp::os::exit(1);*/ } } |
Functions | |
| template<class T > | |
| T * | allocAndCheckDebug (int size) |
| template<class T > | |
| void | checkAndDestroyDebug (T *&p) |
| ControlBoardHelper2 * | castToMapper2 (void *p) |
Detailed Description
A collection of debug methods useful to send raw commands directly to the control boards.
Definition in file DebugInterfaces.h.
Macro Definition Documentation
◆ _YARP_ASSERT_DEBUG
| #define _YARP_ASSERT_DEBUG | ( | x | ) | { if (!(x)) { printf("memory allocation failure\n"); /*yarp::os::exit(1);*/ } } |
Definition at line 59 of file DebugInterfaces.h.
◆ VOCAB_DEBUG_PARAMETER
| #define VOCAB_DEBUG_PARAMETER yarp::os::createVocab32('d','b','g','p') |
Definition at line 48 of file DebugInterfaces.h.
◆ VOCAB_GENERIC_PARAMETER
Definition at line 47 of file DebugInterfaces.h.
Function Documentation
◆ allocAndCheckDebug()
Definition at line 62 of file DebugInterfaces.h.
◆ castToMapper2()
|
inline |
Definition at line 532 of file DebugInterfaces.h.
◆ checkAndDestroyDebug()
Definition at line 71 of file DebugInterfaces.h.