Helper class providing useful methods to deal with Cartesian Solver options. More...
#include <iKinHlp.h>
 Inheritance diagram for iCub::iKin::CartesianHelper:
Inheritance diagram for iCub::iKin::CartesianHelper: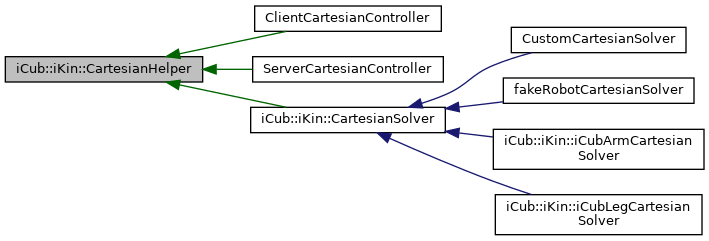
Static Public Member Functions | |
| static void | addTargetOption (yarp::os::Bottle &b, const yarp::sig::Vector &xd) |
| Appends to a bottle all data needed to command a target. | |
| static void | addDOFOption (yarp::os::Bottle &b, const yarp::sig::Vector &dof) |
| Appends to a bottle all data needed to reconfigure chain's dof. | |
| static void | addJointsResPosOption (yarp::os::Bottle &b, const yarp::sig::Vector &restPos) |
| Appends to a bottle all data needed to modify joints rest position. | |
| static void | addJointsRestWeightsOption (yarp::os::Bottle &b, const yarp::sig::Vector &restWeights) |
| Appends to a bottle all data needed to modify joints rest weights. | |
| static void | addPoseOption (yarp::os::Bottle &b, const unsigned int pose) |
| Appends to a bottle all data needed to change the pose mode. | |
| static void | addModeOption (yarp::os::Bottle &b, const bool tracking) |
| Appends to a bottle all data needed to change the tracking mode. | |
| static void | addTokenOption (yarp::os::Bottle &b, const double token) |
| Appends to a bottle a token to be exchanged with the solver. | |
| static yarp::os::Bottle * | getTargetOption (const yarp::os::Bottle &b) |
| Retrieves commanded target data from a bottle. | |
| static yarp::os::Bottle * | getEndEffectorPoseOption (const yarp::os::Bottle &b) |
| Retrieves the end-effector pose data. | |
| static yarp::os::Bottle * | getJointsOption (const yarp::os::Bottle &b) |
| Retrieves the joints configuration data. | |
| static bool | getTokenOption (const yarp::os::Bottle &b, double *token) |
| Retrieves the token from the bottle. | |
| static bool | computeFixationPointData (iKinChain &eyeL, iKinChain &eyeR, yarp::sig::Vector &fp) |
| Retrieves current fixation point given the current kinematics configuration of the eyes. | |
| static bool | computeFixationPointData (iKinChain &eyeL, iKinChain &eyeR, yarp::sig::Vector &fp, yarp::sig::Matrix &J) |
| Retrieves current fixation point and its Jacobian wrt eyes tilt-pan-vergence dofs given the current kinematics configuration of the eyes. | |
Static Protected Member Functions | |
| static void | addVectorOption (yarp::os::Bottle &b, const int vcb, const yarp::sig::Vector &v) |
| static bool | getDesiredOption (const yarp::os::Bottle &reply, yarp::sig::Vector &xdhat, yarp::sig::Vector &odhat, yarp::sig::Vector &qdhat) |
Detailed Description
Helper class providing useful methods to deal with Cartesian Solver options.
Member Function Documentation
◆ addDOFOption()
|
static |
Appends to a bottle all data needed to reconfigure chain's dof.
- Parameters
-
b is the bottle where to append the data. dof is the vector of new chain's dof configuration.
Definition at line 93 of file iKinHlp.cpp.
◆ addJointsResPosOption()
|
static |
Appends to a bottle all data needed to modify joints rest position.
- Parameters
-
b is the bottle where to append the data. restPos is the vector of new joints rest position expressed in [deg].
Definition at line 100 of file iKinHlp.cpp.
◆ addJointsRestWeightsOption()
|
static |
Appends to a bottle all data needed to modify joints rest weights.
- Parameters
-
b is the bottle where to append the data. restWeights is the vector of new joints rest weights.
Definition at line 107 of file iKinHlp.cpp.
◆ addModeOption()
|
static |
Appends to a bottle all data needed to change the tracking mode.
- Parameters
-
b is the bottle where to append the data. tracking true to enable tracking mode.
Definition at line 127 of file iKinHlp.cpp.
◆ addPoseOption()
|
static |
Appends to a bottle all data needed to change the pose mode.
- Parameters
-
b is the bottle where to append the data. pose is the new pose mode. IKINCTRL_POSE_FULL => complete pose control. IKINCTRL_POSE_XYZ => translational part of pose controlled.
Definition at line 114 of file iKinHlp.cpp.
◆ addTargetOption()
|
static |
Appends to a bottle all data needed to command a target.
- Parameters
-
b is the bottle where to append the data. xd is the target [7-components vector].
Definition at line 86 of file iKinHlp.cpp.
◆ addTokenOption()
|
static |
Appends to a bottle a token to be exchanged with the solver.
- Parameters
-
token.
- Note
- useful for some synchronization.
Definition at line 140 of file iKinHlp.cpp.
◆ addVectorOption()
|
staticprotected |
Definition at line 26 of file iKinHlp.cpp.
◆ computeFixationPointData() [1/2]
|
static |
Retrieves current fixation point given the current kinematics configuration of the eyes.
- Parameters
-
eyeL the current configuration of the left eye. eyeR the current configuration of the right eye. fp the Vector where to store the fixation point coordinates.
- Returns
- true iff the computation of the quantities went well, false otherwise.
◆ computeFixationPointData() [2/2]
|
static |
Retrieves current fixation point and its Jacobian wrt eyes tilt-pan-vergence dofs given the current kinematics configuration of the eyes.
- Parameters
-
eyeL the current configuration of the left eye. eyeR the current configuration of the right eye. fp the Vector where to store the fixation point coordinates. J the fixation point Jacobian wrt eyes configuration.
- Returns
- true iff the computation of the quantities went well, false otherwise.
◆ getDesiredOption()
|
staticprotected |
Definition at line 38 of file iKinHlp.cpp.
◆ getEndEffectorPoseOption()
|
static |
Retrieves the end-effector pose data.
- Parameters
-
b is the bottle containing the data to be retrieved.
- Returns
- a pointer to the sub-bottle containing the retrieved data.
Definition at line 156 of file iKinHlp.cpp.
◆ getJointsOption()
|
static |
Retrieves the joints configuration data.
- Parameters
-
b is the bottle containing the data to be retrieved.
- Returns
- a pointer to the sub-bottle containing the retrieved data.
Definition at line 163 of file iKinHlp.cpp.
◆ getTargetOption()
|
static |
Retrieves commanded target data from a bottle.
- Parameters
-
b is the bottle containing the data to be retrieved.
- Returns
- a pointer to the sub-bottle containing the retrieved data.
Definition at line 149 of file iKinHlp.cpp.
◆ getTokenOption()
|
static |
Retrieves the token from the bottle.
- Parameters
-
b is the bottle containing the data to be retrieved. token is the pointer where to return the token.
- Returns
- true iff the token property is present within the bottle b
Definition at line 170 of file iKinHlp.cpp.
The documentation for this class was generated from the following files:
- icub-main/src/libraries/iKin/include/iCub/iKin/iKinHlp.h
- icub-main/src/libraries/iKin/src/iKinHlp.cpp