A Base class for defining a Serial Link Chain. More...
#include <iKinFwd.h>
 Inheritance diagram for iCub::iKin::iKinChain:
Inheritance diagram for iCub::iKin::iKinChain: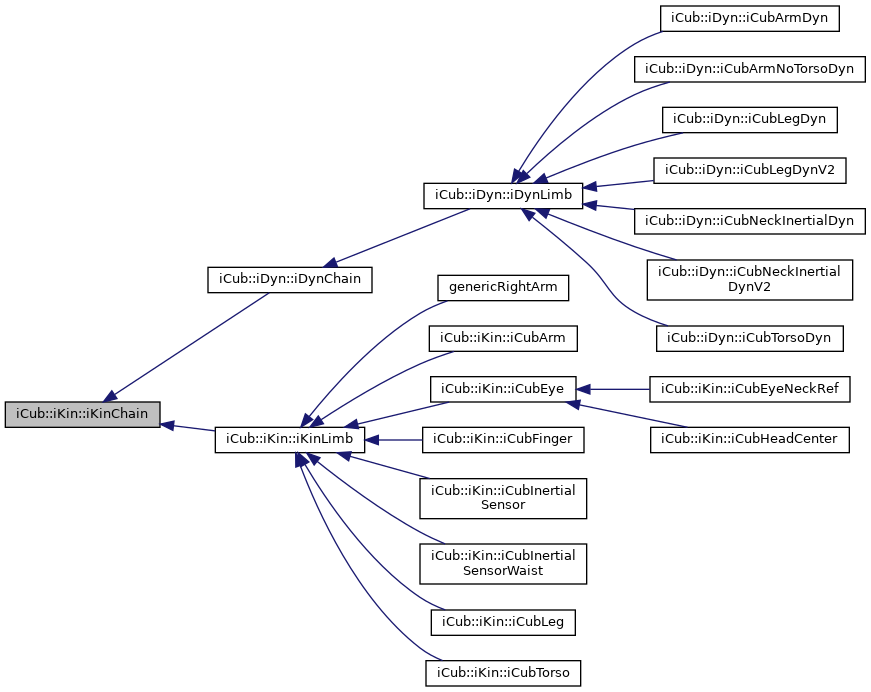
Public Member Functions | |
| iKinChain () | |
| Default constructor. | |
| iKinChain (const iKinChain &c) | |
| Creates a new Chain from an already existing Chain object. | |
| iKinChain & | operator= (const iKinChain &c) |
| Copies a Chain object into the current one. | |
| iKinChain & | operator<< (iKinLink &l) |
| Adds a Link at the bottom of the Chain. | |
| iKinChain & | operator-- (int) |
| Removes a Link from the bottom of the Chain. | |
| iKinLink & | operator[] (const unsigned int i) |
| Returns a reference to the ith Link of the Chain. | |
| iKinLink & | operator() (const unsigned int i) |
| Returns a reference to the ith Link of the Chain considering only those Links related to DOF. | |
| bool | addLink (const unsigned int i, iKinLink &l) |
| Adds a Link at the position ith within the Chain. | |
| bool | rmLink (const unsigned int i) |
| Removes the ith Link from the Chain. | |
| void | pushLink (iKinLink &l) |
| Adds a Link at the bottom of the Chain. | |
| void | clear () |
| Removes all Links. | |
| void | popLink () |
| Removes a Link from the bottom of the Chain. | |
| bool | blockLink (const unsigned int i, double Ang) |
| Blocks the ith Link at the a certain value of its joint angle. | |
| bool | blockLink (const unsigned int i) |
| Blocks the ith Link at the current value of its joint angle. | |
| bool | setBlockingValue (const unsigned int i, double Ang) |
| Changes the value of the ith blocked Link. | |
| bool | releaseLink (const unsigned int i) |
| Releases the ith Link. | |
| bool | isLinkBlocked (const unsigned int i) |
| Queries whether the ith Link is blocked. | |
| void | setAllConstraints (bool _constrained) |
| Sets the constraint status of all chain links. | |
| void | setConstraint (unsigned int i, bool _constrained) |
| Sets the constraint status of ith link. | |
| bool | getConstraint (unsigned int i) |
| Returns the constraint status of ith link. | |
| void | setAllLinkVerbosity (unsigned int _verbose) |
| Sets the verbosity level of all Links belonging to the Chain. | |
| void | setVerbosity (unsigned int _verbose) |
| Sets the verbosity level of the Chain. | |
| unsigned int | getVerbosity () const |
| Returns the current Chain verbosity level. | |
| unsigned int | getN () const |
| Returns the number of Links belonging to the Chain. | |
| unsigned int | getDOF () const |
| Returns the current number of Chain's DOF. | |
| yarp::sig::Matrix | getH0 () const |
| Returns H0, the rigid roto-translation matrix from the root reference frame to the 0th frame. | |
| bool | setH0 (const yarp::sig::Matrix &_H0) |
| Sets H0, the rigid roto-translation matrix from the root reference frame to the 0th frame. | |
| yarp::sig::Matrix | getHN () const |
| Returns HN, the rigid roto-translation matrix from the Nth frame to the end-effector. | |
| bool | setHN (const yarp::sig::Matrix &_HN) |
| Sets HN, the rigid roto-translation matrix from the Nth frame to the end-effector. | |
| yarp::sig::Vector | setAng (const yarp::sig::Vector &q) |
| Sets the free joint angles to values of q[i]. | |
| yarp::sig::Vector | getAng () |
| Returns the current free joint angles values. | |
| double | setAng (const unsigned int i, double _Ang) |
| Sets the ith joint angle. | |
| double | getAng (const unsigned int i) |
| Returns the current angle of ith joint. | |
| yarp::sig::Matrix | getH (const unsigned int i, const bool allLink=false) |
| Returns the rigid roto-translation matrix from the root reference frame to the ith frame in Denavit-Hartenberg notation. | |
| yarp::sig::Matrix | getH () |
| Returns the rigid roto-translation matrix from the root reference frame to the end-effector frame in Denavit-Hartenberg notation (HN is taken into account). | |
| yarp::sig::Matrix | getH (const yarp::sig::Vector &q) |
| Returns the rigid roto-translation matrix from the root reference frame to the end-effector frame in Denavit-Hartenberg notation (HN is taken into account). | |
| yarp::sig::Vector | Pose (const unsigned int i, const bool axisRep=true) |
| Returns the coordinates of ith Link. | |
| yarp::sig::Vector | Position (const unsigned int i) |
| Returns the 3D position coordinates of ith Link. | |
| yarp::sig::Vector | EndEffPose (const bool axisRep=true) |
| Returns the coordinates of end-effector. | |
| yarp::sig::Vector | EndEffPose (const yarp::sig::Vector &q, const bool axisRep=true) |
| Returns the coordinates of end-effector computed in q. | |
| yarp::sig::Vector | EndEffPosition () |
| Returns the 3D coordinates of end-effector position. | |
| yarp::sig::Vector | EndEffPosition (const yarp::sig::Vector &q) |
| Returns the 3D coordinates of end-effector position computed in q. | |
| yarp::sig::Matrix | AnaJacobian (const unsigned int i, unsigned int col) |
| Returns the analitical Jacobian of the ith link. | |
| yarp::sig::Matrix | AnaJacobian (unsigned int col=3) |
| Returns the analitical Jacobian of the end-effector. | |
| yarp::sig::Matrix | AnaJacobian (const yarp::sig::Vector &q, unsigned int col=3) |
| Returns the analitical Jacobian of the end-effector computed in q. | |
| yarp::sig::Matrix | GeoJacobian (const unsigned int i) |
| Returns the geometric Jacobian of the ith link. | |
| yarp::sig::Matrix | GeoJacobian () |
| Returns the geometric Jacobian of the end-effector. | |
| yarp::sig::Matrix | GeoJacobian (const yarp::sig::Vector &q) |
| Returns the geometric Jacobian of the end-effector computed in q. | |
| yarp::sig::Vector | Hessian_ij (const unsigned int i, const unsigned int j) |
| Returns the 6x1 vector \(
\partial{^2}F\left(q\right)/\partial q_i \partial q_j, \) where \( F\left(q\right) \) is the forward kinematic function and \( \left(q_i,q_j\right) \) is the DOF couple. | |
| void | prepareForHessian () |
| Prepares computation for a successive call to fastHessian_ij(). | |
| yarp::sig::Vector | fastHessian_ij (const unsigned int i, const unsigned int j) |
| Returns the 6x1 vector \(
\partial{^2}F\left(q\right)/\partial q_i \partial q_j, \) where \( F\left(q\right) \) is the forward kinematic function and \( \left(q_i,q_j\right) \) is the DOF couple. | |
| yarp::sig::Vector | Hessian_ij (const unsigned int lnk, const unsigned int i, const unsigned int j) |
| Returns the 6x1 vector \(
\partial{^2}F\left(q\right)/\partial q_i \partial q_j, \) where \( F\left(q\right) \) is the forward kinematic function and \( \left(q_i,q_j\right) \) is the couple of links. | |
| void | prepareForHessian (const unsigned int lnk) |
| Prepares computation for a successive call to fastHessian_ij() (link version). | |
| yarp::sig::Vector | fastHessian_ij (const unsigned int lnk, const unsigned int i, const unsigned int j) |
| Returns the 6x1 vector \(
\partial{^2}F\left(q\right)/\partial q_i \partial q_j, \) where \( F\left(q\right) \) is the forward kinematic function and \( \left(q_i,q_j\right) \) is the couple of links. | |
| yarp::sig::Matrix | DJacobian (const yarp::sig::Vector &dq) |
| Compute the time derivative of the geometric Jacobian. | |
| yarp::sig::Matrix | DJacobian (const unsigned int lnk, const yarp::sig::Vector &dq) |
| Compute the time derivative of the geometric Jacobian (link version). | |
| virtual | ~iKinChain () |
| Destructor. | |
Protected Member Functions | |
| virtual void | clone (const iKinChain &c) |
| virtual void | build () |
| virtual void | dispose () |
| yarp::sig::Vector | RotAng (const yarp::sig::Matrix &R) |
| yarp::sig::Vector | dRotAng (const yarp::sig::Matrix &R, const yarp::sig::Matrix &dR) |
| yarp::sig::Vector | d2RotAng (const yarp::sig::Matrix &R, const yarp::sig::Matrix &dRi, const yarp::sig::Matrix &dRj, const yarp::sig::Matrix &d2R) |
Protected Attributes | |
| unsigned int | N |
| unsigned int | DOF |
| unsigned int | verbose |
| yarp::sig::Matrix | H0 |
| yarp::sig::Matrix | HN |
| yarp::sig::Vector | curr_q |
| std::deque< iKinLink * > | allList |
| std::deque< iKinLink * > | quickList |
| std::deque< unsigned int > | hash |
| std::deque< unsigned int > | hash_dof |
| yarp::sig::Matrix | hess_J |
| yarp::sig::Matrix | hess_Jlnk |
Detailed Description
Constructor & Destructor Documentation
◆ iKinChain() [1/2]
| iKinChain::iKinChain | ( | ) |
Default constructor.
Definition at line 256 of file iKinFwd.cpp.
◆ iKinChain() [2/2]
| iKinChain::iKinChain | ( | const iKinChain & | c | ) |
Creates a new Chain from an already existing Chain object.
- Parameters
-
c is the Chain to be copied.
Definition at line 283 of file iKinFwd.cpp.
◆ ~iKinChain()
|
virtual |
Destructor.
Definition at line 1300 of file iKinFwd.cpp.
Member Function Documentation
◆ addLink()
| bool iKinChain::addLink | ( | const unsigned int | i, |
| iKinLink & | l | ||
| ) |
Adds a Link at the position ith within the Chain.
- Parameters
-
i is the ith position where the Link is to be added. l is the Link to be added.
- Returns
- true if successful (e.g. param i is in range).
Definition at line 299 of file iKinFwd.cpp.
◆ AnaJacobian() [1/3]
| Matrix iKinChain::AnaJacobian | ( | const unsigned int | i, |
| unsigned int | col | ||
| ) |
Returns the analitical Jacobian of the ith link.
- Parameters
-
i is the Link number. col selects the part of the derived homogeneous matrix to be put in the upper side of the Jacobian matrix: 0 => x, 1 => y, 2 => z, 3 => p
- Returns
- the analitical Jacobian.
Definition at line 911 of file iKinFwd.cpp.
◆ AnaJacobian() [2/3]
| yarp::sig::Matrix iCub::iKin::iKinChain::AnaJacobian | ( | const yarp::sig::Vector & | q, |
| unsigned int | col = 3 |
||
| ) |
Returns the analitical Jacobian of the end-effector computed in q.
- Parameters
-
q is the vector of new DOF values. col selects the part of the derived homogeneous matrix to be put in the upper side of the Jacobian matrix: 0 => x, 1 => y, 2 => z, 3 => p (default)
- Returns
- the analitical Jacobian.
◆ AnaJacobian() [3/3]
| Matrix iKinChain::AnaJacobian | ( | unsigned int | col = 3 | ) |
Returns the analitical Jacobian of the end-effector.
- Parameters
-
col selects the part of the derived homogeneous matrix to be put in the upper side of the Jacobian matrix: 0 => x, 1 => y, 2 => z, 3 => p (default)
- Returns
- the analitical Jacobian.
Definition at line 957 of file iKinFwd.cpp.
◆ blockLink() [1/2]
|
inline |
◆ blockLink() [2/2]
| bool iKinChain::blockLink | ( | const unsigned int | i, |
| double | Ang | ||
| ) |
Blocks the ith Link at the a certain value of its joint angle.
Chain DOF reduced by one.
- Parameters
-
i is the Link number. Ang is the value of joint angle to which the Link is blocked.
- Returns
- true if successful (e.g. param i is in range).
Definition at line 394 of file iKinFwd.cpp.
◆ build()
|
protectedvirtual |
Reimplemented in iCub::iDyn::iDynChain.
Definition at line 514 of file iKinFwd.cpp.
◆ clear()
| void iKinChain::clear | ( | ) |
Removes all Links.
Definition at line 353 of file iKinFwd.cpp.
◆ clone()
|
protectedvirtual |
Definition at line 264 of file iKinFwd.cpp.
◆ d2RotAng()
|
protected |
Definition at line 686 of file iKinFwd.cpp.
◆ dispose()
|
protectedvirtual |
Reimplemented in iCub::iDyn::iDynChain, iCub::iDyn::iDynLimb, and iCub::iKin::iKinLimb.
Definition at line 1307 of file iKinFwd.cpp.
◆ DJacobian() [1/2]
| yarp::sig::Matrix iCub::iKin::iKinChain::DJacobian | ( | const unsigned int | lnk, |
| const yarp::sig::Vector & | dq | ||
| ) |
Compute the time derivative of the geometric Jacobian (link version).
- Parameters
-
lnk is the Link number up to which consider the computation. dq the (lnk-1)x1 joint velocity vector.
- Returns
- the 6x(lnk-1) matrix \( \partial{^2}F\left(q\right)/\partial t \partial q. \)
◆ DJacobian() [2/2]
| yarp::sig::Matrix iCub::iKin::iKinChain::DJacobian | ( | const yarp::sig::Vector & | dq | ) |
Compute the time derivative of the geometric Jacobian.
- Parameters
-
dq the joint velocities.
- Returns
- the 6xDOF matrix \( \partial{^2}F\left(q\right)/\partial t \partial q. \)
◆ dRotAng()
|
protected |
Definition at line 673 of file iKinFwd.cpp.
◆ EndEffPose() [1/2]
| Vector iKinChain::EndEffPose | ( | const bool | axisRep = true | ) |
Returns the coordinates of end-effector.
Two notations are provided: the first with Euler Angles (XYZ form=>6x1 output vector) and second with axis/angle representation (default=>7x1 output vector).
- Parameters
-
axisRep if true returns the axis/angle notation.
- Returns
- the end-effector pose.
Definition at line 850 of file iKinFwd.cpp.
◆ EndEffPose() [2/2]
| yarp::sig::Vector iCub::iKin::iKinChain::EndEffPose | ( | const yarp::sig::Vector & | q, |
| const bool | axisRep = true |
||
| ) |
Returns the coordinates of end-effector computed in q.
Two notations are provided: the first with Euler Angles (XYZ form=>6x1 output vector) and second with axis/angle representation (default=>7x1 output vector).
- Parameters
-
q is the vector of new DOF values. axisRep if true returns the axis/angle notation.
- Returns
- the end-effector pose.
◆ EndEffPosition() [1/2]
| Vector iKinChain::EndEffPosition | ( | ) |
Returns the 3D coordinates of end-effector position.
- Returns
- the end-effector position.
Definition at line 894 of file iKinFwd.cpp.
◆ EndEffPosition() [2/2]
| yarp::sig::Vector iCub::iKin::iKinChain::EndEffPosition | ( | const yarp::sig::Vector & | q | ) |
Returns the 3D coordinates of end-effector position computed in q.
- Parameters
-
q is the vector of new DOF values.
- Returns
- the end-effector position.
◆ fastHessian_ij() [1/2]
| Vector iKinChain::fastHessian_ij | ( | const unsigned int | i, |
| const unsigned int | j | ||
| ) |
Returns the 6x1 vector \( \partial{^2}F\left(q\right)/\partial q_i \partial q_j, \) where \( F\left(q\right) \) is the forward kinematic function and \( \left(q_i,q_j\right) \) is the DOF couple.
Fast Version: to be used in conjunction with prepareForHessian().
- Parameters
-
i is the index of the first DOF. j is the index of the second DOF.
- Returns
- the 6x1 vector \( \partial{^2}F\left(q\right)/\partial q_i \partial q_j. \)
- Note
- It is advisable to use this version when successive computations with different indexes values are needed.
- See also
- prepareForHessian
Definition at line 1117 of file iKinFwd.cpp.
◆ fastHessian_ij() [2/2]
| Vector iKinChain::fastHessian_ij | ( | const unsigned int | lnk, |
| const unsigned int | i, | ||
| const unsigned int | j | ||
| ) |
Returns the 6x1 vector \( \partial{^2}F\left(q\right)/\partial q_i \partial q_j, \) where \( F\left(q\right) \) is the forward kinematic function and \( \left(q_i,q_j\right) \) is the couple of links.
Fast Version: to be used in conjunction with prepareForHessian(lnk).
- Parameters
-
lnk is the Link number up to which consider the computation. i is the index of the first link. j is the index of the second link.
- Returns
- the 6x1 vector \( \partial{^2}F\left(q\right)/\partial q_i \partial q_j. \)
- Note
- It is advisable to use this version when successive computations with different indexes values are needed.
- See also
- prepareForHessian
Definition at line 1173 of file iKinFwd.cpp.
◆ GeoJacobian() [1/3]
| Matrix iKinChain::GeoJacobian | ( | ) |
Returns the geometric Jacobian of the end-effector.
- Returns
- the 6xDOF geometric Jacobian matrix.
- Note
- The blocked links are not considered.
Definition at line 1048 of file iKinFwd.cpp.
◆ GeoJacobian() [2/3]
| Matrix iKinChain::GeoJacobian | ( | const unsigned int | i | ) |
Returns the geometric Jacobian of the ith link.
- Parameters
-
i is the Link number.
- Returns
- the 6x(i-1) geometric Jacobian matrix.
- Note
- All the links are considered.
Definition at line 1012 of file iKinFwd.cpp.
◆ GeoJacobian() [3/3]
| yarp::sig::Matrix iCub::iKin::iKinChain::GeoJacobian | ( | const yarp::sig::Vector & | q | ) |
Returns the geometric Jacobian of the end-effector computed in q.
- Parameters
-
q is the vector of new DOF values.
- Returns
- the geometric Jacobian.
- Note
- The blocked links are not considered.
◆ getAng() [1/2]
| Vector iKinChain::getAng | ( | ) |
Returns the current free joint angles values.
- Returns
- the actual DOF values.
Definition at line 611 of file iKinFwd.cpp.
◆ getAng() [2/2]
| double iKinChain::getAng | ( | const unsigned int | i | ) |
Returns the current angle of ith joint.
- Parameters
-
i is the Link number.
- Returns
- current ith joint angle.
Definition at line 645 of file iKinFwd.cpp.
◆ getConstraint()
|
inline |
◆ getDOF()
|
inline |
◆ getH() [1/3]
| Matrix iKinChain::getH | ( | ) |
Returns the rigid roto-translation matrix from the root reference frame to the end-effector frame in Denavit-Hartenberg notation (HN is taken into account).
- Returns
- H(N-1)*HN
Definition at line 778 of file iKinFwd.cpp.
◆ getH() [2/3]
| Matrix iKinChain::getH | ( | const unsigned int | i, |
| const bool | allLink = false |
||
| ) |
Returns the rigid roto-translation matrix from the root reference frame to the ith frame in Denavit-Hartenberg notation.
The second parameter if true enables the spannig over the full set of links, i.e. the blocked links as well.
- Parameters
-
i is the Link number. allLink if true enables the spanning over the full set of links (false by default).
- Returns
- Hi
Definition at line 732 of file iKinFwd.cpp.
◆ getH() [3/3]
| yarp::sig::Matrix iCub::iKin::iKinChain::getH | ( | const yarp::sig::Vector & | q | ) |
Returns the rigid roto-translation matrix from the root reference frame to the end-effector frame in Denavit-Hartenberg notation (HN is taken into account).
- Parameters
-
q is the vector of new DOF values.
- Returns
- H(N-1)*HN
◆ getH0()
|
inline |
◆ getHN()
|
inline |
◆ getN()
|
inline |
◆ getVerbosity()
|
inline |
◆ Hessian_ij() [1/2]
| Vector iKinChain::Hessian_ij | ( | const unsigned int | i, |
| const unsigned int | j | ||
| ) |
Returns the 6x1 vector \( \partial{^2}F\left(q\right)/\partial q_i \partial q_j, \) where \( F\left(q\right) \) is the forward kinematic function and \( \left(q_i,q_j\right) \) is the DOF couple.
- Parameters
-
i is the index of the first DOF. j is the index of the second DOF.
- Returns
- the 6x1 vector \( \partial{^2}F\left(q\right)/\partial q_i \partial q_j. \)
Definition at line 1094 of file iKinFwd.cpp.
◆ Hessian_ij() [2/2]
| Vector iKinChain::Hessian_ij | ( | const unsigned int | lnk, |
| const unsigned int | i, | ||
| const unsigned int | j | ||
| ) |
Returns the 6x1 vector \( \partial{^2}F\left(q\right)/\partial q_i \partial q_j, \) where \( F\left(q\right) \) is the forward kinematic function and \( \left(q_i,q_j\right) \) is the couple of links.
- Parameters
-
lnk is the Link number up to which consider the computation. i is the index of the first link. j is the index of the second link.
- Returns
- the 6x1 vector \( \partial{^2}F\left(q\right)/\partial q_i \partial q_j. \)
Definition at line 1149 of file iKinFwd.cpp.
◆ isLinkBlocked()
| bool iKinChain::isLinkBlocked | ( | const unsigned int | i | ) |
Queries whether the ith Link is blocked.
- Parameters
-
i is the Link number.
- Returns
- true if blocked && (param i is in range).
Definition at line 483 of file iKinFwd.cpp.
◆ operator()()
|
inline |
◆ operator--()
| iKinChain & iKinChain::operator-- | ( | int | ) |
Removes a Link from the bottom of the Chain.
- Returns
- a reference to the current object.
Definition at line 385 of file iKinFwd.cpp.
◆ operator<<()
Adds a Link at the bottom of the Chain.
- Parameters
-
l is the Link to be added.
- Returns
- a reference to the current object.
Definition at line 366 of file iKinFwd.cpp.
◆ operator=()
Copies a Chain object into the current one.
- Parameters
-
c is a reference to an object of type iKinChain.
- Returns
- a reference to the current object.
Definition at line 290 of file iKinFwd.cpp.
◆ operator[]()
|
inline |
◆ popLink()
| void iKinChain::popLink | ( | ) |
Removes a Link from the bottom of the Chain.
- See also
- operator--()
Definition at line 375 of file iKinFwd.cpp.
◆ Pose()
| Vector iKinChain::Pose | ( | const unsigned int | i, |
| const bool | axisRep = true |
||
| ) |
Returns the coordinates of ith Link.
Two notations are provided: the first with Euler Angles (XYZ form=>6x1 output vector) and second with axis/angle representation (default=>7x1 output vector).
- Parameters
-
i is the Link number. axisRep if true returns the axis/angle notation.
- Returns
- the ith Link Pose.
Definition at line 803 of file iKinFwd.cpp.
◆ Position()
| Vector iKinChain::Position | ( | const unsigned int | i | ) |
Returns the 3D position coordinates of ith Link.
- Parameters
-
i is the Link number.
- Returns
- the ith Link Position.
Definition at line 842 of file iKinFwd.cpp.
◆ prepareForHessian() [1/2]
| void iKinChain::prepareForHessian | ( | ) |
Prepares computation for a successive call to fastHessian_ij().
- See also
- fastHessian_ij
Definition at line 1102 of file iKinFwd.cpp.
◆ prepareForHessian() [2/2]
| void iKinChain::prepareForHessian | ( | const unsigned int | lnk | ) |
Prepares computation for a successive call to fastHessian_ij() (link version).
- Parameters
-
lnk is the Link number up to which consider the computation.
- See also
- fastHessian_ij
Definition at line 1158 of file iKinFwd.cpp.
◆ pushLink()
| void iKinChain::pushLink | ( | iKinLink & | l | ) |
Adds a Link at the bottom of the Chain.
- Parameters
-
l is the Link to be added.
- See also
- operator<<
Definition at line 343 of file iKinFwd.cpp.
◆ releaseLink()
| bool iKinChain::releaseLink | ( | const unsigned int | i | ) |
Releases the ith Link.
Chain DOF augmented by one.
- Parameters
-
i is the Link number.
- Returns
- true if successful (e.g. param i is in range).
Definition at line 463 of file iKinFwd.cpp.
◆ rmLink()
| bool iKinChain::rmLink | ( | const unsigned int | i | ) |
Removes the ith Link from the Chain.
- Parameters
-
i is the ith position from which the Link is to be removed.
- Returns
- true if successful (e.g. param i is in range).
Definition at line 321 of file iKinFwd.cpp.
◆ RotAng()
|
protected |
Definition at line 659 of file iKinFwd.cpp.
◆ setAllConstraints()
| void iKinChain::setAllConstraints | ( | bool | _constrained | ) |
Sets the constraint status of all chain links.
- Parameters
-
_constrained is the new constraint status.
Definition at line 498 of file iKinFwd.cpp.
◆ setAllLinkVerbosity()
| void iKinChain::setAllLinkVerbosity | ( | unsigned int | _verbose | ) |
Sets the verbosity level of all Links belonging to the Chain.
- Parameters
-
_verbose is the verbosity level.
Definition at line 506 of file iKinFwd.cpp.
◆ setAng() [1/2]
| double iKinChain::setAng | ( | const unsigned int | i, |
| double | _Ang | ||
| ) |
Sets the ith joint angle.
- Parameters
-
i is the Link number. Ang the new angle's value.
- Returns
- current ith joint angle (angle constraint is evaluated).
Definition at line 623 of file iKinFwd.cpp.
◆ setAng() [2/2]
| yarp::sig::Vector iCub::iKin::iKinChain::setAng | ( | const yarp::sig::Vector & | q | ) |
Sets the free joint angles to values of q[i].
- Parameters
-
q is a vector containing values for DOF.
- Returns
- the actual DOF values (angles constraints are evaluated).
◆ setBlockingValue()
| bool iKinChain::setBlockingValue | ( | const unsigned int | i, |
| double | Ang | ||
| ) |
Changes the value of the ith blocked Link.
Avoid the overhead required for DOFs handling.
- Parameters
-
i is the Link number. Ang is the new value of joint angle to which the Link is blocked.
- Returns
- true if successful (e.g. param i is in range and the ith Link was already blocked).
Definition at line 414 of file iKinFwd.cpp.
◆ setConstraint()
|
inline |
◆ setH0()
| bool iKinChain::setH0 | ( | const yarp::sig::Matrix & | _H0 | ) |
Sets H0, the rigid roto-translation matrix from the root reference frame to the 0th frame.
- Parameters
-
H0
- Returns
- true if succeed, false otherwise.
Definition at line 562 of file iKinFwd.cpp.
◆ setHN()
| bool iKinChain::setHN | ( | const yarp::sig::Matrix & | _HN | ) |
Sets HN, the rigid roto-translation matrix from the Nth frame to the end-effector.
- Parameters
-
HN
- Returns
- true if succeed, false otherwise.
Definition at line 580 of file iKinFwd.cpp.
◆ setVerbosity()
|
inline |
Member Data Documentation
◆ allList
|
protected |
◆ curr_q
◆ DOF
◆ H0
◆ hash
|
protected |
◆ hash_dof
|
protected |
◆ hess_J
◆ hess_Jlnk
|
protected |
◆ HN
◆ N
◆ quickList
|
protected |
◆ verbose
The documentation for this class was generated from the following files:
- icub-main/src/libraries/iKin/include/iCub/iKin/iKinFwd.h
- icub-main/src/libraries/iKin/src/iKinFwd.cpp