#include <solver.h>
|
| | Solver (PolyDriver *_drvTorso, PolyDriver *_drvHead, ExchangeData *_commData, EyePinvRefGen *_eyesRefGen, Localizer *_loc, Controller *_ctrl, const unsigned int _period) |
| |
| virtual | ~Solver () |
| |
| double | neckTargetRotAngle (const Vector &xd) |
| |
| void | bindNeckPitch (const double min_deg, const double max_deg) |
| |
| void | bindNeckRoll (const double min_deg, const double max_deg) |
| |
| void | bindNeckYaw (const double min_deg, const double max_deg) |
| |
| void | getCurNeckPitchRange (double &min_deg, double &max_deg) |
| |
| void | getCurNeckRollRange (double &min_deg, double &max_deg) |
| |
| void | getCurNeckYawRange (double &min_deg, double &max_deg) |
| |
| void | clearNeckPitch () |
| |
| void | clearNeckRoll () |
| |
| void | clearNeckYaw () |
| |
| double | getNeckAngleUserTolerance () const |
| |
| void | setNeckAngleUserTolerance (const double angle) |
| |
| bool | threadInit () override |
| |
| void | threadRelease () override |
| |
| void | afterStart (bool s) override |
| |
| void | run () override |
| |
| void | suspend () |
| |
| void | resume () |
| |
| | Solver (ResourceFinder &_rf, inPort *_port_q, exchangeData *_commData, unsigned int period) |
| |
| virtual bool | threadInit () |
| |
| virtual void | afterStart (bool s) |
| |
| virtual void | run () |
| |
| virtual void | threadRelease () |
| |
| virtual bool | getExtrinsicsMatrix (const string &type, Matrix &M) |
| |
| virtual bool | setExtrinsicsMatrix (const string &type, const Matrix &M) |
| |
| virtual void | minAllowedVergenceChanged () |
| |
Definition at line 119 of file solver.h.
◆ Solver() [1/2]
◆ ~Solver()
◆ Solver() [2/2]
| Solver::Solver |
( |
ResourceFinder & |
_rf, |
|
|
inPort * |
_port_q, |
|
|
exchangeData * |
_commData, |
|
|
unsigned int |
period |
|
) |
| |
|
inline |
◆ afterStart() [1/2]
| virtual void Solver::afterStart |
( |
bool |
s | ) |
|
|
inlinevirtual |
◆ afterStart() [2/2]
| void Solver::afterStart |
( |
bool |
s | ) |
|
|
override |
◆ bindNeckPitch()
| void Solver::bindNeckPitch |
( |
const double |
min_deg, |
|
|
const double |
max_deg |
|
) |
| |
◆ bindNeckRoll()
| void Solver::bindNeckRoll |
( |
const double |
min_deg, |
|
|
const double |
max_deg |
|
) |
| |
◆ bindNeckYaw()
| void Solver::bindNeckYaw |
( |
const double |
min_deg, |
|
|
const double |
max_deg |
|
) |
| |
◆ clearNeckPitch()
| void Solver::clearNeckPitch |
( |
| ) |
|
◆ clearNeckRoll()
| void Solver::clearNeckRoll |
( |
| ) |
|
◆ clearNeckYaw()
| void Solver::clearNeckYaw |
( |
| ) |
|
◆ computeTargetUserTolerance()
| Vector Solver::computeTargetUserTolerance |
( |
const Vector & |
xd | ) |
|
|
protected |
◆ getCurNeckPitchRange()
| void Solver::getCurNeckPitchRange |
( |
double & |
min_deg, |
|
|
double & |
max_deg |
|
) |
| |
◆ getCurNeckRollRange()
| void Solver::getCurNeckRollRange |
( |
double & |
min_deg, |
|
|
double & |
max_deg |
|
) |
| |
◆ getCurNeckYawRange()
| void Solver::getCurNeckYawRange |
( |
double & |
min_deg, |
|
|
double & |
max_deg |
|
) |
| |
◆ getNeckAngleUserTolerance()
| double Solver::getNeckAngleUserTolerance |
( |
| ) |
const |
◆ neckTargetRotAngle()
| double Solver::neckTargetRotAngle |
( |
const Vector & |
xd | ) |
|
◆ resume()
◆ run() [1/2]
| virtual void Solver::run |
( |
| ) |
|
|
inlinevirtual |
◆ run() [2/2]
◆ setNeckAngleUserTolerance()
| void Solver::setNeckAngleUserTolerance |
( |
const double |
angle | ) |
|
◆ suspend()
◆ threadInit() [1/2]
| virtual bool Solver::threadInit |
( |
| ) |
|
|
inlinevirtual |
◆ threadInit() [2/2]
| bool Solver::threadInit |
( |
| ) |
|
|
override |
◆ threadRelease() [1/2]
| virtual void Solver::threadRelease |
( |
| ) |
|
|
inlinevirtual |
◆ threadRelease() [2/2]
| void Solver::threadRelease |
( |
| ) |
|
|
override |
◆ updateAngles()
| void Solver::updateAngles |
( |
| ) |
|
|
protected |
◆ chain
◆ chainEyeL
◆ chainEyeR
◆ chainNeck
◆ commData [1/2]
◆ commData [2/2]
◆ ctrl
◆ drvHead
| PolyDriver * Solver::drvHead |
|
protected |
◆ drvTorso
| PolyDriver* Solver::drvTorso |
|
protected |
◆ eyesRefGen
◆ fbHead
◆ fbTorso
◆ gazePos
◆ imu
◆ invNeck
◆ limb
◆ loc
◆ mtx
◆ neck
◆ neckAngleUserTolerance
| double Solver::neckAngleUserTolerance |
|
protected |
◆ neckPitchMax
| double Solver::neckPitchMax |
|
protected |
◆ neckPitchMin
| double Solver::neckPitchMin |
|
protected |
◆ neckPos
◆ neckRollMax
| double Solver::neckRollMax |
|
protected |
◆ neckRollMin
| double Solver::neckRollMin |
|
protected |
◆ neckYawMax
| double Solver::neckYawMax |
|
protected |
◆ neckYawMin
| double Solver::neckYawMin |
|
protected |
◆ nJointsHead
◆ nJointsTorso
◆ period
| unsigned int Solver::period |
|
protected |
◆ port_q
◆ port_qd
◆ port_xd
◆ rf
| ResourceFinder& Solver::rf |
|
protected |
◆ slv
◆ torsoVel
◆ Ts
◆ xd_old
The documentation for this class was generated from the following files:
- icub-main/src/modules/iKinGazeCtrl/include/iCub/solver.h
- icub-tutorials/src/iKin/genericChainController/main.cpp
- icub-main/src/modules/iKinGazeCtrl/src/solver.cpp
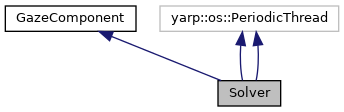
 Inheritance diagram for Solver:
Inheritance diagram for Solver: