parametricCalibrator: implement calibration routines for the iCub arm(s) (version 1.2).
More...
#include <parametricCalibratorEth.h>
parametricCalibrator: implement calibration routines for the iCub arm(s) (version 1.2).
A calibrator interface implementation for the Arm of the robot iCub.
Definition at line 42 of file parametricCalibratorEth.h.
◆ parametricCalibratorEth()
| parametricCalibratorEth::parametricCalibratorEth |
( |
| ) |
|
◆ ~parametricCalibratorEth()
| parametricCalibratorEth::~parametricCalibratorEth |
( |
| ) |
|
◆ calibrate()
| bool parametricCalibratorEth::calibrate |
( |
DeviceDriver * |
device | ) |
|
|
override |
Calibrate method.
Call this to calibrate the complete device.
- Parameters
-
| dd | is a pointer to the DeviceDriver to calibrate which must implement the position control interfaces of the standard control board devices. |
- Returns
- true if calibration was successful, false otherwise.
Definition at line 502 of file parametricCalibratorEth.cpp.
◆ calibrateSingleJoint()
| bool parametricCalibratorEth::calibrateSingleJoint |
( |
int |
j | ) |
|
|
overridevirtual |
◆ calibrateWholePart()
| bool parametricCalibratorEth::calibrateWholePart |
( |
| ) |
|
|
overridevirtual |
◆ close()
| bool parametricCalibratorEth::close |
( |
| ) |
|
|
overridevirtual |
◆ getCalibratorDevice()
| yarp::dev::IRemoteCalibrator * parametricCalibratorEth::getCalibratorDevice |
( |
| ) |
|
|
overridevirtual |
◆ homingSingleJoint()
| bool parametricCalibratorEth::homingSingleJoint |
( |
int |
j | ) |
|
|
overridevirtual |
◆ homingWholePart()
| bool parametricCalibratorEth::homingWholePart |
( |
| ) |
|
|
overridevirtual |
◆ open()
| bool parametricCalibratorEth::open |
( |
yarp::os::Searchable & |
config | ) |
|
|
overridevirtual |
Open the device driver.
- Parameters
-
| config | is a reference to a Searchable object which contains the initialization parameters. |
- Returns
- true/false on success/failure.
Definition at line 161 of file parametricCalibratorEth.cpp.
◆ park()
| bool parametricCalibratorEth::park |
( |
DeviceDriver * |
dd, |
|
|
bool |
wait = true |
|
) |
| |
|
overridevirtual |
◆ parkSingleJoint()
| bool parametricCalibratorEth::parkSingleJoint |
( |
int |
j, |
|
|
bool |
_wait = true |
|
) |
| |
|
overridevirtual |
◆ parkWholePart()
| bool parametricCalibratorEth::parkWholePart |
( |
| ) |
|
|
overridevirtual |
◆ quitCalibrate()
| bool parametricCalibratorEth::quitCalibrate |
( |
| ) |
|
|
overridevirtual |
◆ quitPark()
| bool parametricCalibratorEth::quitPark |
( |
| ) |
|
|
overridevirtual |
The documentation for this class was generated from the following files:
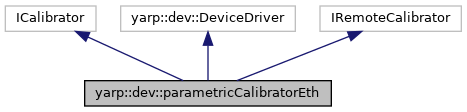
 Inheritance diagram for yarp::dev::parametricCalibratorEth:
Inheritance diagram for yarp::dev::parametricCalibratorEth: