|
| | ImuFilter () |
| |
| virtual | ~ImuFilter ()=default |
| |
| bool | threadInit () override |
| |
| void | run () override |
| |
| void | threadRelease () override |
| |
| bool | open (yarp::os::Searchable &config) override |
| |
| bool | close () override |
| |
| bool | attachAll (const yarp::dev::PolyDriverList &p) override |
| |
| bool | detachAll () override |
| |
| bool | getThreeAxisGyroscopeMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| |
| | PassThroughInertial () |
| |
| virtual | ~PassThroughInertial () |
| |
| bool | open (yarp::os::Searchable &config) override |
| |
| bool | close () override |
| |
| size_t | getNrOfThreeAxisGyroscopes () const override |
| |
| yarp::dev::MAS_status | getThreeAxisGyroscopeStatus (size_t sens_index) const override |
| |
| bool | getThreeAxisGyroscopeName (size_t sens_index, std::string &name) const override |
| |
| bool | getThreeAxisGyroscopeFrameName (size_t sens_index, std::string &frameName) const override |
| |
| bool | getThreeAxisGyroscopeMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| |
| size_t | getNrOfThreeAxisLinearAccelerometers () const override |
| |
| yarp::dev::MAS_status | getThreeAxisLinearAccelerometerStatus (size_t sens_index) const override |
| |
| bool | getThreeAxisLinearAccelerometerName (size_t sens_index, std::string &name) const override |
| |
| bool | getThreeAxisLinearAccelerometerFrameName (size_t sens_index, std::string &frameName) const override |
| |
| bool | getThreeAxisLinearAccelerometerMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| |
| size_t | getNrOfThreeAxisMagnetometers () const override |
| |
| yarp::dev::MAS_status | getThreeAxisMagnetometerStatus (size_t sens_index) const override |
| |
| bool | getThreeAxisMagnetometerName (size_t sens_index, std::string &name) const override |
| |
| bool | getThreeAxisMagnetometerFrameName (size_t sens_index, std::string &frameName) const override |
| |
| bool | getThreeAxisMagnetometerMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| |
| size_t | getNrOfOrientationSensors () const override |
| |
| yarp::dev::MAS_status | getOrientationSensorStatus (size_t sens_index) const override |
| |
| bool | getOrientationSensorName (size_t sens_index, std::string &name) const override |
| |
| bool | getOrientationSensorFrameName (size_t sens_index, std::string &frameName) const override |
| |
| bool | getOrientationSensorMeasureAsRollPitchYaw (size_t sens_index, yarp::sig::Vector &rpy, double ×tamp) const override |
| |
| bool | attachAll (const yarp::dev::PolyDriverList &p) override |
| |
| bool | detachAll () override |
| |
Definition at line 158 of file ImuFilter.h.
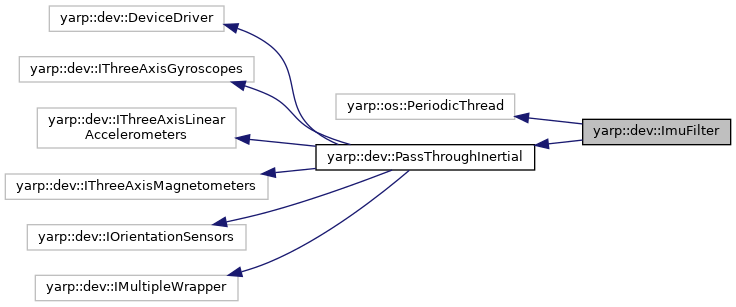
 Inheritance diagram for yarp::dev::ImuFilter:
Inheritance diagram for yarp::dev::ImuFilter: