#include <PassThroughInertial.h>
|
| | PassThroughInertial () |
| |
| virtual | ~PassThroughInertial () |
| |
| bool | open (yarp::os::Searchable &config) override |
| |
| bool | close () override |
| |
| size_t | getNrOfThreeAxisGyroscopes () const override |
| |
| yarp::dev::MAS_status | getThreeAxisGyroscopeStatus (size_t sens_index) const override |
| |
| bool | getThreeAxisGyroscopeName (size_t sens_index, std::string &name) const override |
| |
| bool | getThreeAxisGyroscopeFrameName (size_t sens_index, std::string &frameName) const override |
| |
| bool | getThreeAxisGyroscopeMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| |
| size_t | getNrOfThreeAxisLinearAccelerometers () const override |
| |
| yarp::dev::MAS_status | getThreeAxisLinearAccelerometerStatus (size_t sens_index) const override |
| |
| bool | getThreeAxisLinearAccelerometerName (size_t sens_index, std::string &name) const override |
| |
| bool | getThreeAxisLinearAccelerometerFrameName (size_t sens_index, std::string &frameName) const override |
| |
| bool | getThreeAxisLinearAccelerometerMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| |
| size_t | getNrOfThreeAxisMagnetometers () const override |
| |
| yarp::dev::MAS_status | getThreeAxisMagnetometerStatus (size_t sens_index) const override |
| |
| bool | getThreeAxisMagnetometerName (size_t sens_index, std::string &name) const override |
| |
| bool | getThreeAxisMagnetometerFrameName (size_t sens_index, std::string &frameName) const override |
| |
| bool | getThreeAxisMagnetometerMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| |
| size_t | getNrOfOrientationSensors () const override |
| |
| yarp::dev::MAS_status | getOrientationSensorStatus (size_t sens_index) const override |
| |
| bool | getOrientationSensorName (size_t sens_index, std::string &name) const override |
| |
| bool | getOrientationSensorFrameName (size_t sens_index, std::string &frameName) const override |
| |
| bool | getOrientationSensorMeasureAsRollPitchYaw (size_t sens_index, yarp::sig::Vector &rpy, double ×tamp) const override |
| |
| bool | attachAll (const yarp::dev::PolyDriverList &p) override |
| |
| bool | detachAll () override |
| |
Definition at line 16 of file PassThroughInertial.h.
◆ PassThroughInertial()
| yarp::dev::PassThroughInertial::PassThroughInertial |
( |
| ) |
|
◆ ~PassThroughInertial()
| yarp::dev::PassThroughInertial::~PassThroughInertial |
( |
| ) |
|
|
virtual |
◆ attachAll()
| bool yarp::dev::PassThroughInertial::attachAll |
( |
const yarp::dev::PolyDriverList & |
p | ) |
|
|
override |
◆ close()
| bool yarp::dev::PassThroughInertial::close |
( |
| ) |
|
|
override |
◆ detachAll()
| bool yarp::dev::PassThroughInertial::detachAll |
( |
| ) |
|
|
override |
◆ getNrOfOrientationSensors()
| size_t yarp::dev::PassThroughInertial::getNrOfOrientationSensors |
( |
| ) |
const |
|
override |
◆ getNrOfThreeAxisGyroscopes()
| size_t yarp::dev::PassThroughInertial::getNrOfThreeAxisGyroscopes |
( |
| ) |
const |
|
override |
◆ getNrOfThreeAxisLinearAccelerometers()
| size_t yarp::dev::PassThroughInertial::getNrOfThreeAxisLinearAccelerometers |
( |
| ) |
const |
|
override |
◆ getNrOfThreeAxisMagnetometers()
| size_t yarp::dev::PassThroughInertial::getNrOfThreeAxisMagnetometers |
( |
| ) |
const |
|
override |
◆ getOrientationSensorFrameName()
| bool yarp::dev::PassThroughInertial::getOrientationSensorFrameName |
( |
size_t |
sens_index, |
|
|
std::string & |
frameName |
|
) |
| const |
|
override |
◆ getOrientationSensorMeasureAsRollPitchYaw()
| bool yarp::dev::PassThroughInertial::getOrientationSensorMeasureAsRollPitchYaw |
( |
size_t |
sens_index, |
|
|
yarp::sig::Vector & |
rpy, |
|
|
double & |
timestamp |
|
) |
| const |
|
override |
◆ getOrientationSensorName()
| bool yarp::dev::PassThroughInertial::getOrientationSensorName |
( |
size_t |
sens_index, |
|
|
std::string & |
name |
|
) |
| const |
|
override |
◆ getOrientationSensorStatus()
| yarp::dev::MAS_status yarp::dev::PassThroughInertial::getOrientationSensorStatus |
( |
size_t |
sens_index | ) |
const |
|
override |
◆ getThreeAxisGyroscopeFrameName()
| bool yarp::dev::PassThroughInertial::getThreeAxisGyroscopeFrameName |
( |
size_t |
sens_index, |
|
|
std::string & |
frameName |
|
) |
| const |
|
override |
◆ getThreeAxisGyroscopeMeasure()
| bool yarp::dev::PassThroughInertial::getThreeAxisGyroscopeMeasure |
( |
size_t |
sens_index, |
|
|
yarp::sig::Vector & |
out, |
|
|
double & |
timestamp |
|
) |
| const |
|
override |
◆ getThreeAxisGyroscopeName()
| bool yarp::dev::PassThroughInertial::getThreeAxisGyroscopeName |
( |
size_t |
sens_index, |
|
|
std::string & |
name |
|
) |
| const |
|
override |
◆ getThreeAxisGyroscopeStatus()
| yarp::dev::MAS_status yarp::dev::PassThroughInertial::getThreeAxisGyroscopeStatus |
( |
size_t |
sens_index | ) |
const |
|
override |
◆ getThreeAxisLinearAccelerometerFrameName()
| bool yarp::dev::PassThroughInertial::getThreeAxisLinearAccelerometerFrameName |
( |
size_t |
sens_index, |
|
|
std::string & |
frameName |
|
) |
| const |
|
override |
◆ getThreeAxisLinearAccelerometerMeasure()
| bool yarp::dev::PassThroughInertial::getThreeAxisLinearAccelerometerMeasure |
( |
size_t |
sens_index, |
|
|
yarp::sig::Vector & |
out, |
|
|
double & |
timestamp |
|
) |
| const |
|
override |
◆ getThreeAxisLinearAccelerometerName()
| bool yarp::dev::PassThroughInertial::getThreeAxisLinearAccelerometerName |
( |
size_t |
sens_index, |
|
|
std::string & |
name |
|
) |
| const |
|
override |
◆ getThreeAxisLinearAccelerometerStatus()
| yarp::dev::MAS_status yarp::dev::PassThroughInertial::getThreeAxisLinearAccelerometerStatus |
( |
size_t |
sens_index | ) |
const |
|
override |
◆ getThreeAxisMagnetometerFrameName()
| bool yarp::dev::PassThroughInertial::getThreeAxisMagnetometerFrameName |
( |
size_t |
sens_index, |
|
|
std::string & |
frameName |
|
) |
| const |
|
override |
◆ getThreeAxisMagnetometerMeasure()
| bool yarp::dev::PassThroughInertial::getThreeAxisMagnetometerMeasure |
( |
size_t |
sens_index, |
|
|
yarp::sig::Vector & |
out, |
|
|
double & |
timestamp |
|
) |
| const |
|
override |
◆ getThreeAxisMagnetometerName()
| bool yarp::dev::PassThroughInertial::getThreeAxisMagnetometerName |
( |
size_t |
sens_index, |
|
|
std::string & |
name |
|
) |
| const |
|
override |
◆ getThreeAxisMagnetometerStatus()
| yarp::dev::MAS_status yarp::dev::PassThroughInertial::getThreeAxisMagnetometerStatus |
( |
size_t |
sens_index | ) |
const |
|
override |
◆ open()
| bool yarp::dev::PassThroughInertial::open |
( |
yarp::os::Searchable & |
config | ) |
|
|
override |
◆ proxyDevice
| yarp::dev::PolyDriver yarp::dev::PassThroughInertial::proxyDevice |
|
protected |
◆ proxyIAccel
| yarp::dev::IThreeAxisLinearAccelerometers* yarp::dev::PassThroughInertial::proxyIAccel |
|
protected |
◆ proxyIGyro
| yarp::dev::IThreeAxisGyroscopes* yarp::dev::PassThroughInertial::proxyIGyro |
|
protected |
◆ proxyIMagn
| yarp::dev::IThreeAxisMagnetometers* yarp::dev::PassThroughInertial::proxyIMagn |
|
protected |
◆ proxyIOrient
| yarp::dev::IOrientationSensors* yarp::dev::PassThroughInertial::proxyIOrient |
|
protected |
The documentation for this class was generated from the following files:
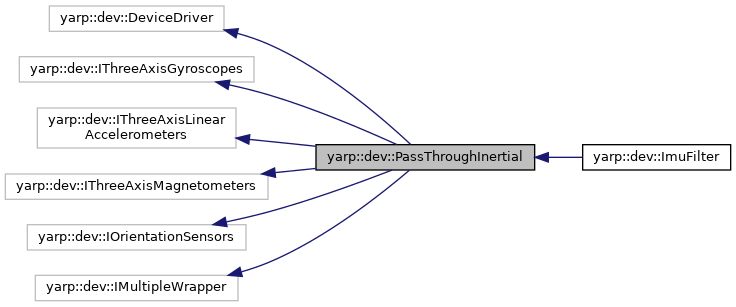
 Inheritance diagram for yarp::dev::PassThroughInertial:
Inheritance diagram for yarp::dev::PassThroughInertial: