|
| | iKinLimb () |
| | Default constructor.
|
| |
| | iKinLimb (const std::string &_type) |
| | Constructor.
|
| |
| | iKinLimb (const iKinLimb &limb) |
| | Creates a new Limb from an already existing Limb object.
|
| |
| | iKinLimb (const yarp::os::Property &options) |
| | Creates a new Limb from a list of properties wherein links parameters are specified.
|
| |
| bool | fromLinksProperties (const yarp::os::Property &options) |
| | Initializes the Limb from a list of properties wherein links parameters are specified.
|
| |
| bool | toLinksProperties (yarp::os::Property &options) |
| | Provides the links attributes listed in a property object.
|
| |
| bool | isValid () const |
| | Checks if the limb has been properly configured.
|
| |
| iKinLimb & | operator= (const iKinLimb &limb) |
| | Copies a Limb object into the current one.
|
| |
| iKinChain * | asChain () |
| | Returns a pointer to the Limb seen as Chain object.
|
| |
| std::string | getType () const |
| | Returns the Limb type as a string.
|
| |
| virtual bool | alignJointsBounds (const std::deque< yarp::dev::IControlLimits * > &) |
| | Alignes the Limb joints bounds with current values set aboard the robot.
|
| |
| virtual | ~iKinLimb () |
| | Destructor.
|
| |
| | iKinChain () |
| | Default constructor.
|
| |
| | iKinChain (const iKinChain &c) |
| | Creates a new Chain from an already existing Chain object.
|
| |
| iKinChain & | operator= (const iKinChain &c) |
| | Copies a Chain object into the current one.
|
| |
| iKinChain & | operator<< (iKinLink &l) |
| | Adds a Link at the bottom of the Chain.
|
| |
| iKinChain & | operator-- (int) |
| | Removes a Link from the bottom of the Chain.
|
| |
| iKinLink & | operator[] (const unsigned int i) |
| | Returns a reference to the ith Link of the Chain.
|
| |
| iKinLink & | operator() (const unsigned int i) |
| | Returns a reference to the ith Link of the Chain considering only those Links related to DOF.
|
| |
| bool | addLink (const unsigned int i, iKinLink &l) |
| | Adds a Link at the position ith within the Chain.
|
| |
| bool | rmLink (const unsigned int i) |
| | Removes the ith Link from the Chain.
|
| |
| void | pushLink (iKinLink &l) |
| | Adds a Link at the bottom of the Chain.
|
| |
| void | clear () |
| | Removes all Links.
|
| |
| void | popLink () |
| | Removes a Link from the bottom of the Chain.
|
| |
| bool | blockLink (const unsigned int i, double Ang) |
| | Blocks the ith Link at the a certain value of its joint angle.
|
| |
| bool | blockLink (const unsigned int i) |
| | Blocks the ith Link at the current value of its joint angle.
|
| |
| bool | setBlockingValue (const unsigned int i, double Ang) |
| | Changes the value of the ith blocked Link.
|
| |
| bool | releaseLink (const unsigned int i) |
| | Releases the ith Link.
|
| |
| bool | isLinkBlocked (const unsigned int i) |
| | Queries whether the ith Link is blocked.
|
| |
| void | setAllConstraints (bool _constrained) |
| | Sets the constraint status of all chain links.
|
| |
| void | setConstraint (unsigned int i, bool _constrained) |
| | Sets the constraint status of ith link.
|
| |
| bool | getConstraint (unsigned int i) |
| | Returns the constraint status of ith link.
|
| |
| void | setAllLinkVerbosity (unsigned int _verbose) |
| | Sets the verbosity level of all Links belonging to the Chain.
|
| |
| void | setVerbosity (unsigned int _verbose) |
| | Sets the verbosity level of the Chain.
|
| |
| unsigned int | getVerbosity () const |
| | Returns the current Chain verbosity level.
|
| |
| unsigned int | getN () const |
| | Returns the number of Links belonging to the Chain.
|
| |
| unsigned int | getDOF () const |
| | Returns the current number of Chain's DOF.
|
| |
| yarp::sig::Matrix | getH0 () const |
| | Returns H0, the rigid roto-translation matrix from the root reference frame to the 0th frame.
|
| |
| bool | setH0 (const yarp::sig::Matrix &_H0) |
| | Sets H0, the rigid roto-translation matrix from the root reference frame to the 0th frame.
|
| |
| yarp::sig::Matrix | getHN () const |
| | Returns HN, the rigid roto-translation matrix from the Nth frame to the end-effector.
|
| |
| bool | setHN (const yarp::sig::Matrix &_HN) |
| | Sets HN, the rigid roto-translation matrix from the Nth frame to the end-effector.
|
| |
| yarp::sig::Vector | setAng (const yarp::sig::Vector &q) |
| | Sets the free joint angles to values of q[i].
|
| |
| yarp::sig::Vector | getAng () |
| | Returns the current free joint angles values.
|
| |
| double | setAng (const unsigned int i, double _Ang) |
| | Sets the ith joint angle.
|
| |
| double | getAng (const unsigned int i) |
| | Returns the current angle of ith joint.
|
| |
| yarp::sig::Matrix | getH (const unsigned int i, const bool allLink=false) |
| | Returns the rigid roto-translation matrix from the root reference frame to the ith frame in Denavit-Hartenberg notation.
|
| |
| yarp::sig::Matrix | getH () |
| | Returns the rigid roto-translation matrix from the root reference frame to the end-effector frame in Denavit-Hartenberg notation (HN is taken into account).
|
| |
| yarp::sig::Matrix | getH (const yarp::sig::Vector &q) |
| | Returns the rigid roto-translation matrix from the root reference frame to the end-effector frame in Denavit-Hartenberg notation (HN is taken into account).
|
| |
| yarp::sig::Vector | Pose (const unsigned int i, const bool axisRep=true) |
| | Returns the coordinates of ith Link.
|
| |
| yarp::sig::Vector | Position (const unsigned int i) |
| | Returns the 3D position coordinates of ith Link.
|
| |
| yarp::sig::Vector | EndEffPose (const bool axisRep=true) |
| | Returns the coordinates of end-effector.
|
| |
| yarp::sig::Vector | EndEffPose (const yarp::sig::Vector &q, const bool axisRep=true) |
| | Returns the coordinates of end-effector computed in q.
|
| |
| yarp::sig::Vector | EndEffPosition () |
| | Returns the 3D coordinates of end-effector position.
|
| |
| yarp::sig::Vector | EndEffPosition (const yarp::sig::Vector &q) |
| | Returns the 3D coordinates of end-effector position computed in q.
|
| |
| yarp::sig::Matrix | AnaJacobian (const unsigned int i, unsigned int col) |
| | Returns the analitical Jacobian of the ith link.
|
| |
| yarp::sig::Matrix | AnaJacobian (unsigned int col=3) |
| | Returns the analitical Jacobian of the end-effector.
|
| |
| yarp::sig::Matrix | AnaJacobian (const yarp::sig::Vector &q, unsigned int col=3) |
| | Returns the analitical Jacobian of the end-effector computed in q.
|
| |
| yarp::sig::Matrix | GeoJacobian (const unsigned int i) |
| | Returns the geometric Jacobian of the ith link.
|
| |
| yarp::sig::Matrix | GeoJacobian () |
| | Returns the geometric Jacobian of the end-effector.
|
| |
| yarp::sig::Matrix | GeoJacobian (const yarp::sig::Vector &q) |
| | Returns the geometric Jacobian of the end-effector computed in q.
|
| |
| yarp::sig::Vector | Hessian_ij (const unsigned int i, const unsigned int j) |
| | Returns the 6x1 vector \(
\partial{^2}F\left(q\right)/\partial q_i \partial q_j, \) where \( F\left(q\right) \) is the forward kinematic function and \( \left(q_i,q_j\right) \) is the DOF couple.
|
| |
| void | prepareForHessian () |
| | Prepares computation for a successive call to fastHessian_ij().
|
| |
| yarp::sig::Vector | fastHessian_ij (const unsigned int i, const unsigned int j) |
| | Returns the 6x1 vector \(
\partial{^2}F\left(q\right)/\partial q_i \partial q_j, \) where \( F\left(q\right) \) is the forward kinematic function and \( \left(q_i,q_j\right) \) is the DOF couple.
|
| |
| yarp::sig::Vector | Hessian_ij (const unsigned int lnk, const unsigned int i, const unsigned int j) |
| | Returns the 6x1 vector \(
\partial{^2}F\left(q\right)/\partial q_i \partial q_j, \) where \( F\left(q\right) \) is the forward kinematic function and \( \left(q_i,q_j\right) \) is the couple of links.
|
| |
| void | prepareForHessian (const unsigned int lnk) |
| | Prepares computation for a successive call to fastHessian_ij() (link version).
|
| |
| yarp::sig::Vector | fastHessian_ij (const unsigned int lnk, const unsigned int i, const unsigned int j) |
| | Returns the 6x1 vector \(
\partial{^2}F\left(q\right)/\partial q_i \partial q_j, \) where \( F\left(q\right) \) is the forward kinematic function and \( \left(q_i,q_j\right) \) is the couple of links.
|
| |
| yarp::sig::Matrix | DJacobian (const yarp::sig::Vector &dq) |
| | Compute the time derivative of the geometric Jacobian.
|
| |
| yarp::sig::Matrix | DJacobian (const unsigned int lnk, const yarp::sig::Vector &dq) |
| | Compute the time derivative of the geometric Jacobian (link version).
|
| |
| virtual | ~iKinChain () |
| | Destructor.
|
| |
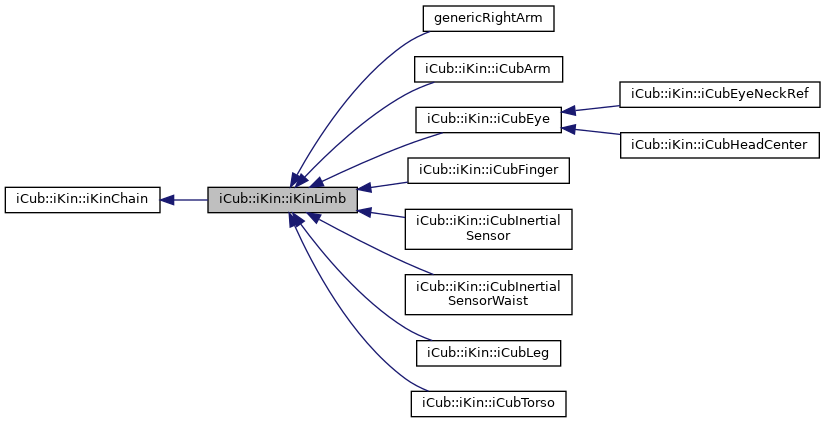
A class for defining generic Limb.
Definition at line 872 of file iKinFwd.h.
 Inheritance diagram for iCub::iKin::iKinLimb:
Inheritance diagram for iCub::iKin::iKinLimb: