#include <cstdio>#include <cstdarg>#include <sstream>#include <cmath>#include <limits>#include <algorithm>#include <yarp/math/Math.h>#include <yarp/math/Rand.h>#include <iCub/ctrl/math.h>#include <iCub/iKin/iKinFwd.h>#include <iCub/perception/springyFingers.h>#include <iCub/perception/tactileFingers.h>#include <iCub/action/actionPrimitives.h> Include dependency graph for actionPrimitives.cpp:
Include dependency graph for actionPrimitives.cpp: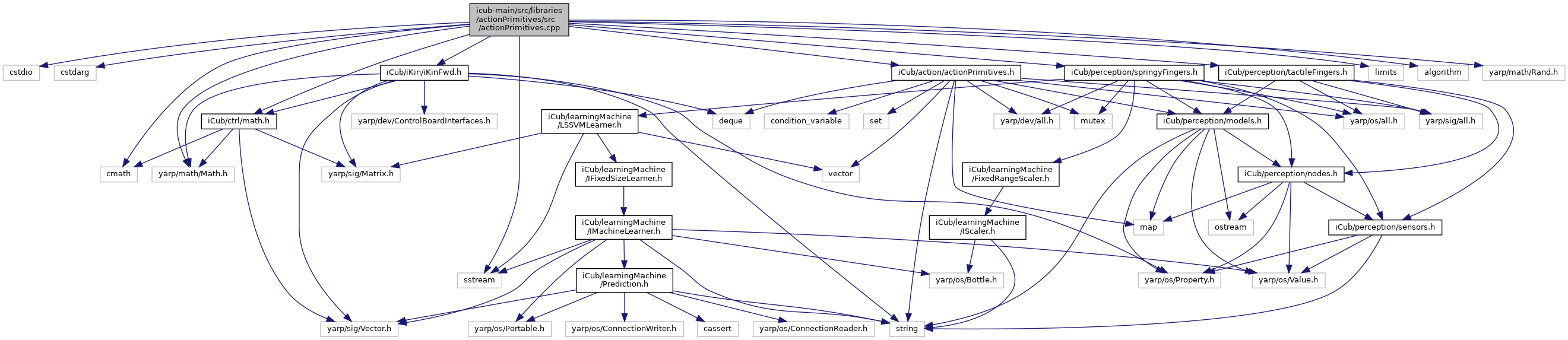
Go to the source code of this file.
Classes | |
| class | iCub::action::ArmWayPoints |
| class | iCub::action::ArmWavingMonitor |
Namespaces | |
| namespace | iCub |
| This file contains the definition of unique IDs for the body parts and the skin parts of the robot. | |
| namespace | iCub::action |
| namespace | iCub::action::log |
Macros | |
| #define | RES_WAVER(x) (dynamic_cast<ArmWavingMonitor*>(x)) |
| #define | ACTIONPRIM_DEFAULT_PER 50 |
| #define | ACTIONPRIM_DEFAULT_EXECTIME 2.0 |
| #define | ACTIONPRIM_DEFAULT_REACHTOL 0.005 |
| #define | ACTIONPRIM_DUMP_PERIOD 1.0 |
| #define | ACTIONPRIM_DEFAULT_PART "right_arm" |
| #define | ACTIONPRIM_DEFAULT_TRACKINGMODE "off" |
| #define | ACTIONPRIM_DEFAULT_VERBOSITY "off" |
| #define | ACTIONPRIM_DEFAULT_WBDYN_STEMNAME "wholeBodyDynamics" |
| #define | ACTIONPRIM_DEFAULT_WBDYN_PORTNAME "cartesianEndEffectorWrench:o" |
| #define | ACTIONPRIM_BALANCEARM_PERIOD 2.0 |
| #define | ACTIONPRIM_BALANCEARM_LENGTH 0.03 |
| #define | ACTIONPRIM_TORSO_PITCH "torso_pitch" |
| #define | ACTIONPRIM_TORSO_ROLL "torso_roll" |
| #define | ACTIONPRIM_TORSO_YAW "torso_yaw" |
Enumerations | |
| enum | { iCub::action::log::no_info , iCub::action::log::info , iCub::action::log::warning , iCub::action::log::error } |
Macro Definition Documentation
◆ ACTIONPRIM_BALANCEARM_LENGTH
| #define ACTIONPRIM_BALANCEARM_LENGTH 0.03 |
Definition at line 49 of file actionPrimitives.cpp.
◆ ACTIONPRIM_BALANCEARM_PERIOD
| #define ACTIONPRIM_BALANCEARM_PERIOD 2.0 |
Definition at line 48 of file actionPrimitives.cpp.
◆ ACTIONPRIM_DEFAULT_EXECTIME
| #define ACTIONPRIM_DEFAULT_EXECTIME 2.0 |
Definition at line 38 of file actionPrimitives.cpp.
◆ ACTIONPRIM_DEFAULT_PART
| #define ACTIONPRIM_DEFAULT_PART "right_arm" |
Definition at line 41 of file actionPrimitives.cpp.
◆ ACTIONPRIM_DEFAULT_PER
| #define ACTIONPRIM_DEFAULT_PER 50 |
Definition at line 37 of file actionPrimitives.cpp.
◆ ACTIONPRIM_DEFAULT_REACHTOL
| #define ACTIONPRIM_DEFAULT_REACHTOL 0.005 |
Definition at line 39 of file actionPrimitives.cpp.
◆ ACTIONPRIM_DEFAULT_TRACKINGMODE
| #define ACTIONPRIM_DEFAULT_TRACKINGMODE "off" |
Definition at line 42 of file actionPrimitives.cpp.
◆ ACTIONPRIM_DEFAULT_VERBOSITY
| #define ACTIONPRIM_DEFAULT_VERBOSITY "off" |
Definition at line 43 of file actionPrimitives.cpp.
◆ ACTIONPRIM_DEFAULT_WBDYN_PORTNAME
| #define ACTIONPRIM_DEFAULT_WBDYN_PORTNAME "cartesianEndEffectorWrench:o" |
Definition at line 45 of file actionPrimitives.cpp.
◆ ACTIONPRIM_DEFAULT_WBDYN_STEMNAME
| #define ACTIONPRIM_DEFAULT_WBDYN_STEMNAME "wholeBodyDynamics" |
Definition at line 44 of file actionPrimitives.cpp.
◆ ACTIONPRIM_DUMP_PERIOD
| #define ACTIONPRIM_DUMP_PERIOD 1.0 |
Definition at line 40 of file actionPrimitives.cpp.
◆ ACTIONPRIM_TORSO_PITCH
| #define ACTIONPRIM_TORSO_PITCH "torso_pitch" |
Definition at line 51 of file actionPrimitives.cpp.
◆ ACTIONPRIM_TORSO_ROLL
| #define ACTIONPRIM_TORSO_ROLL "torso_roll" |
Definition at line 52 of file actionPrimitives.cpp.
◆ ACTIONPRIM_TORSO_YAW
| #define ACTIONPRIM_TORSO_YAW "torso_yaw" |
Definition at line 53 of file actionPrimitives.cpp.
◆ RES_WAVER
| #define RES_WAVER | ( | x | ) | (dynamic_cast<ArmWavingMonitor*>(x)) |
Definition at line 35 of file actionPrimitives.cpp.