#include <yarp/os/all.h>#include <yarp/sig/all.h>#include <yarp/dev/all.h>#include <iCub/ctrl/math.h>#include <iCub/ctrl/adaptWinPolyEstimator.h>#include <iCub/iDyn/iDyn.h>#include <iCub/iDyn/iDynBody.h>#include <iCub/skinDynLib/skinContactList.h>#include <iostream>#include <iomanip>#include <cstring>#include <list> Include dependency graph for observerThread.h:
Include dependency graph for observerThread.h: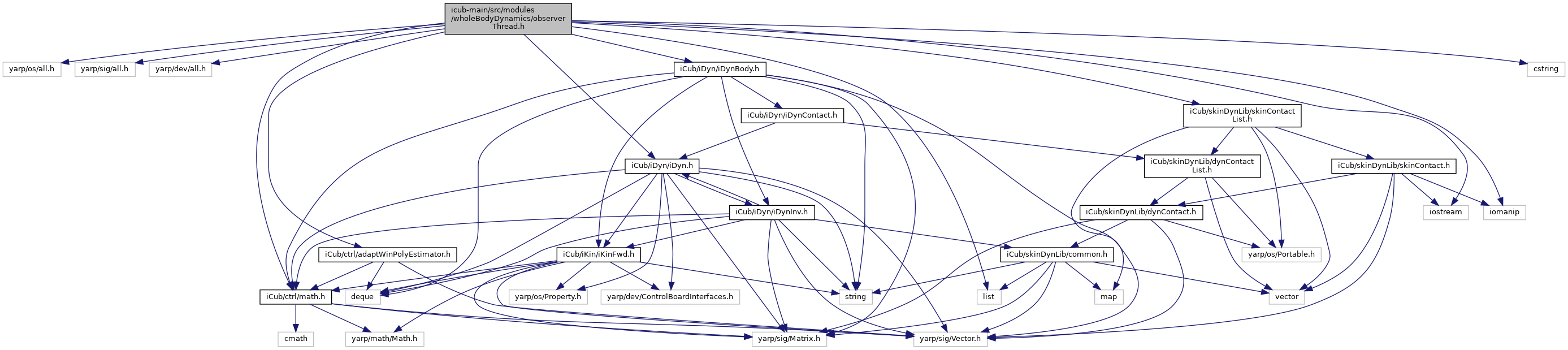 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | iCubStatus |
| class | inverseDynamics |
Enumerations | |
| enum | thread_status_enum { STATUS_OK =0 , STATUS_DISCONNECTED } |
| enum | calib_enum { CALIB_ALL =0 , CALIB_ARMS , CALIB_LEGS , CALIB_FEET } |
Functions | |
| double | lpf_ord1_3hz (double input, int j) |
Variables | |
| constexpr int8_t | MAX_JN = 12 |
| constexpr int8_t | MAX_FILTER_ORDER = 6 |
| constexpr float_t | SKIN_EVENTS_TIMEOUT = 0.2F |
Enumeration Type Documentation
◆ calib_enum
| enum calib_enum |
| Enumerator | |
|---|---|
| CALIB_ALL | |
| CALIB_ARMS | |
| CALIB_LEGS | |
| CALIB_FEET | |
Definition at line 49 of file observerThread.h.
◆ thread_status_enum
| enum thread_status_enum |
| Enumerator | |
|---|---|
| STATUS_OK | |
| STATUS_DISCONNECTED | |
Definition at line 48 of file observerThread.h.
Function Documentation
◆ lpf_ord1_3hz()
| double lpf_ord1_3hz | ( | double | input, |
| int | j | ||
| ) |
Definition at line 46 of file observerThread.cpp.
Variable Documentation
◆ MAX_FILTER_ORDER
|
constexpr |
Definition at line 45 of file observerThread.h.
◆ MAX_JN
|
constexpr |
Definition at line 44 of file observerThread.h.
◆ SKIN_EVENTS_TIMEOUT
|
constexpr |
Definition at line 46 of file observerThread.h.