#include <string>#include <deque>#include <yarp/os/Property.h>#include <yarp/dev/ControlBoardInterfaces.h>#include <yarp/sig/Vector.h>#include <yarp/sig/Matrix.h>#include <yarp/math/Math.h>#include <iCub/ctrl/math.h> Include dependency graph for iKinFwd.h:
Include dependency graph for iKinFwd.h: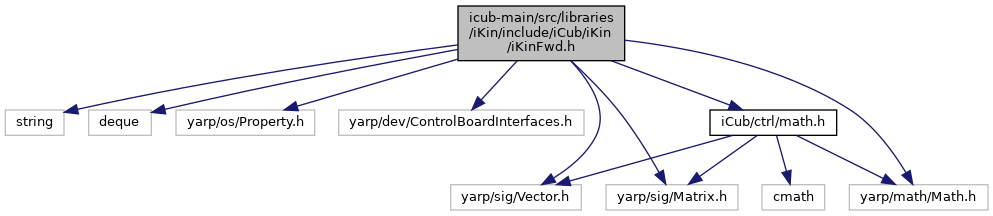 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | iCub::iKin::iKinLink |
| A Base class for defining a Link with standard Denavit-Hartenberg convention. More... | |
| class | iCub::iKin::iKinChain |
| A Base class for defining a Serial Link Chain. More... | |
| class | iCub::iKin::iKinLimb |
| A class for defining generic Limb. More... | |
| class | iCub::iKin::iKinLimbVersion |
| A class for defining the versions of the iCub limbs. More... | |
| class | iCub::iKin::iCubTorso |
| A class for defining the iCub Torso. More... | |
| class | iCub::iKin::iCubArm |
| A class for defining the iCub Arm. More... | |
| class | iCub::iKin::iCubFinger |
| A class for defining the iCub Finger. More... | |
| class | iCub::iKin::iCubLeg |
| A class for defining the iCub Leg. More... | |
| class | iCub::iKin::iCubEye |
| A class for defining the iCub Eye. More... | |
| class | iCub::iKin::iCubEyeNeckRef |
| A class for defining the iCub Eye with the root reference frame attached to the neck. More... | |
| class | iCub::iKin::iCubHeadCenter |
| A class for describing the kinematic of the straight line coming out from the point located between the eyes. More... | |
| class | iCub::iKin::iCubInertialSensor |
| A class for defining the Inertia Sensor Kinematics of the iCub. More... | |
| class | iCub::iKin::iCubInertialSensorWaist |
| A class for defining the Kinematics of the Inertial Sensor mounted in the iCub's Waist. More... | |
Namespaces | |
| namespace | iCub |
| This file contains the definition of unique IDs for the body parts and the skin parts of the robot. | |
| namespace | iCub::iKin |
Functions | |
| void | iCub::iKin::notImplemented (const unsigned int verbose) |