#include <yarp/sig/Vector.h>#include <yarp/sig/Matrix.h>#include <iCub/ctrl/math.h>#include <iCub/iKin/iKinFwd.h>#include <iCub/iDyn/iDynInv.h>#include <iCub/iDyn/iDynContact.h>#include <deque>#include <string> Include dependency graph for iDynBody.h:
Include dependency graph for iDynBody.h: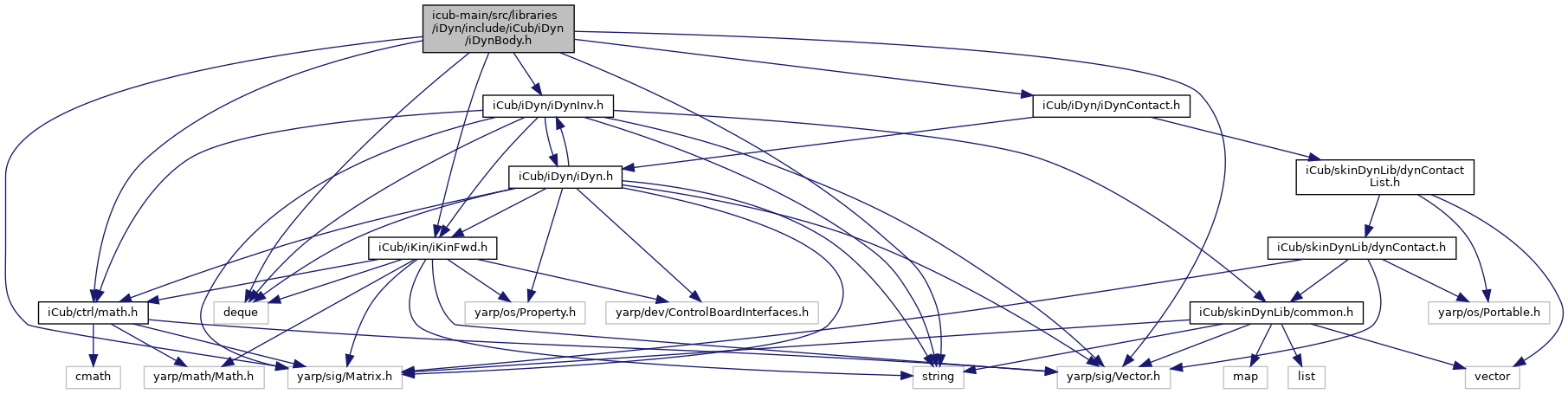 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: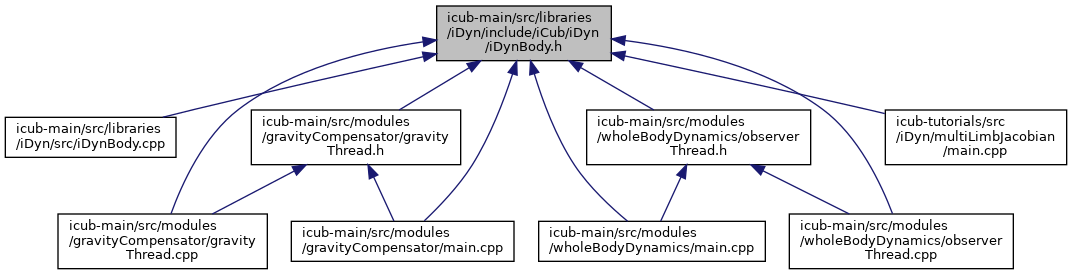
Go to the source code of this file.
Classes | |
| struct | iCub::iDyn::version_tag |
| class | iCub::iDyn::RigidBodyTransformation |
| A class for setting a rigid body transformation between iDynLimb and iDynNode. More... | |
| class | iCub::iDyn::iDynNode |
| A class for connecting two or mutiple limbs and exchanging kinematic and wrench information between limbs. More... | |
| class | iCub::iDyn::iDynSensorNode |
| A class for connecting two or mutiple limbs and exchanging kinematic and wrench information between limbs, when one or multiple limbs have FT sensors. More... | |
| class | iCub::iDyn::iDynSensorTorsoNode |
| A class for connecting a central-up limb, a left and right limb of the iCub, and exchanging kinematic and wrench information between limbs, when both left/right limb have FT sensors and the central-up one use the kinematic and wrench information coming from a inertial measurements or another iDynSensorNode. More... | |
| class | iCub::iDyn::iCubUpperTorso |
| A class for connecting head, left and right arm of the iCub, and exchanging kinematic and wrench information between limbs, when both arms have FT sensors and the head use the inertial sensor. More... | |
| class | iCub::iDyn::iCubLowerTorso |
| A class for connecting torso, left and right leg of the iCub, and exchanging kinematic and wrench information between limbs, when both legs have FT sensors and the torso use the kinematic and wrench information coming from UpperTorso. More... | |
| class | iCub::iDyn::iCubWholeBody |
| A class for connecting UpperTorso and LowerTorso of the iCub, then getting the WholeBody in the dynamic framework. More... | |
Namespaces | |
| namespace | iCub |
| This file contains the definition of unique IDs for the body parts and the skin parts of the robot. | |
| namespace | iCub::iDyn |
Macros | |
| #define | RBT_HAS_SENSOR true |
| #define | RBT_NO_SENSOR false |
| #define | NODE_AFTER_ATTACH true |
| #define | NODE_NO_ATTACH false |
Enumerations | |
| enum | iCub::iDyn::InteractionType { iCub::iDyn::RBT_BASE , iCub::iDyn::RBT_ENDEFF } |
| enum | iCub::iDyn::FlowType { iCub::iDyn::RBT_NODE_IN , iCub::iDyn::RBT_NODE_OUT } |
| enum | iCub::iDyn::JacobType { iCub::iDyn::JAC_KIN , iCub::iDyn::JAC_IKIN } |
Macro Definition Documentation
◆ NODE_AFTER_ATTACH
| #define NODE_AFTER_ATTACH true |
Definition at line 104 of file iDynBody.h.
◆ NODE_NO_ATTACH
| #define NODE_NO_ATTACH false |
Definition at line 105 of file iDynBody.h.
◆ RBT_HAS_SENSOR
| #define RBT_HAS_SENSOR true |
Definition at line 102 of file iDynBody.h.
◆ RBT_NO_SENSOR
| #define RBT_NO_SENSOR false |
Definition at line 103 of file iDynBody.h.