fakecan : implements yarp::dev::ICanBus for a software (fake) can bus board.
More...
#include <fakeCan.h>
 Inheritance diagram for yarp::dev::FakeCan:
Inheritance diagram for yarp::dev::FakeCan: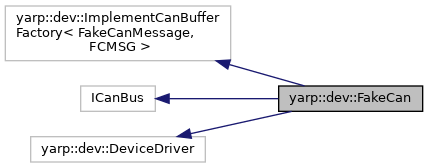
Public Member Functions | |
| FakeCan () | |
| ~FakeCan () | |
| virtual bool | canSetBaudRate (unsigned int rate) |
| virtual bool | canGetBaudRate (unsigned int *rate) |
| virtual bool | canIdAdd (unsigned int id) |
| virtual bool | canIdDelete (unsigned int id) |
| virtual bool | canRead (CanBuffer &msgs, unsigned int size, unsigned int *read, bool wait=false) |
| virtual bool | canWrite (const CanBuffer &msgs, unsigned int size, unsigned int *sent, bool wait=false) |
| virtual bool | open (yarp::os::Searchable &par) |
| virtual bool | close () |
Detailed Description
fakecan : implements yarp::dev::ICanBus for a software (fake) can bus board.
It accepts the same parameter file that can be passed to the real hw (you just need to replace ecan or pcan with fakecan). Useful for debugging robot code in absence of real hw.
The behavior of the fake boards is very simplified, this module is not simulating a real robot.
| YARP device name |
|---|
fakecan |
Constructor & Destructor Documentation
◆ FakeCan()
| FakeCan::FakeCan | ( | ) |
Definition at line 18 of file fakeCan.cpp.
◆ ~FakeCan()
| FakeCan::~FakeCan | ( | ) |
Definition at line 21 of file fakeCan.cpp.
Member Function Documentation
◆ canGetBaudRate()
|
virtual |
Definition at line 30 of file fakeCan.cpp.
◆ canIdAdd()
|
virtual |
Definition at line 35 of file fakeCan.cpp.
◆ canIdDelete()
|
virtual |
Definition at line 40 of file fakeCan.cpp.
◆ canRead()
|
virtual |
Definition at line 45 of file fakeCan.cpp.
◆ canSetBaudRate()
|
virtual |
Definition at line 25 of file fakeCan.cpp.
◆ canWrite()
|
virtual |
Definition at line 73 of file fakeCan.cpp.
◆ close()
|
virtual |
Definition at line 127 of file fakeCan.cpp.
◆ open()
|
virtual |
Definition at line 98 of file fakeCan.cpp.
The documentation for this class was generated from the following files:
- icub-main/src/libraries/icubmod/fakeCan/fakeCan.h
- icub-main/src/libraries/icubmod/fakeCan/fakeCan.cpp