#include <deque>#include <yarp/os/Bottle.h>#include <yarp/sig/Vector.h>#include <yarp/sig/Matrix.h>#include <iCub/ctrl/math.h>#include <iCub/ctrl/filters.h> Include dependency graph for pids.h:
Include dependency graph for pids.h: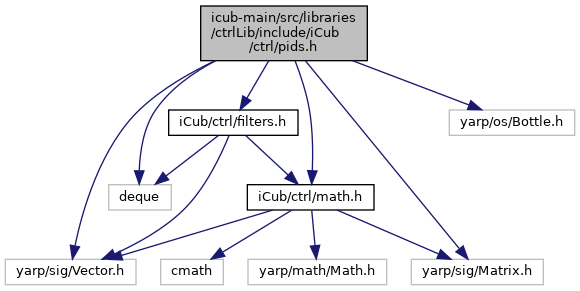 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | iCub::ctrl::Integrator |
| A class for defining a saturated integrator based on Tustin formula: \( 1/s => T_s/2*(z+1)/(z-1) \). More... | |
| class | iCub::ctrl::helperPID |
| Helper class providing useful methods to deal with pid options. More... | |
| class | iCub::ctrl::parallelPID |
| General structure of parallel (non-interactive) PID. More... | |
| class | iCub::ctrl::seriesPID |
| General structure of series (interactive) PID. More... | |
Namespaces | |
| namespace | iCub |
| This file contains the definition of unique IDs for the body parts and the skin parts of the robot. | |
| namespace | iCub::ctrl |