#include <string>#include <deque>#include <yarp/os/Property.h>#include <yarp/sig/Vector.h>#include <yarp/sig/Matrix.h>#include <iCub/ctrl/filters.h> Include dependency graph for minJerkCtrl.h:
Include dependency graph for minJerkCtrl.h: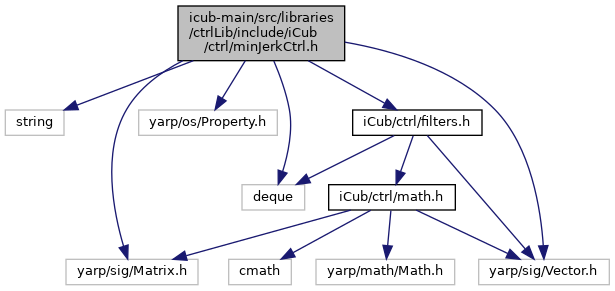 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: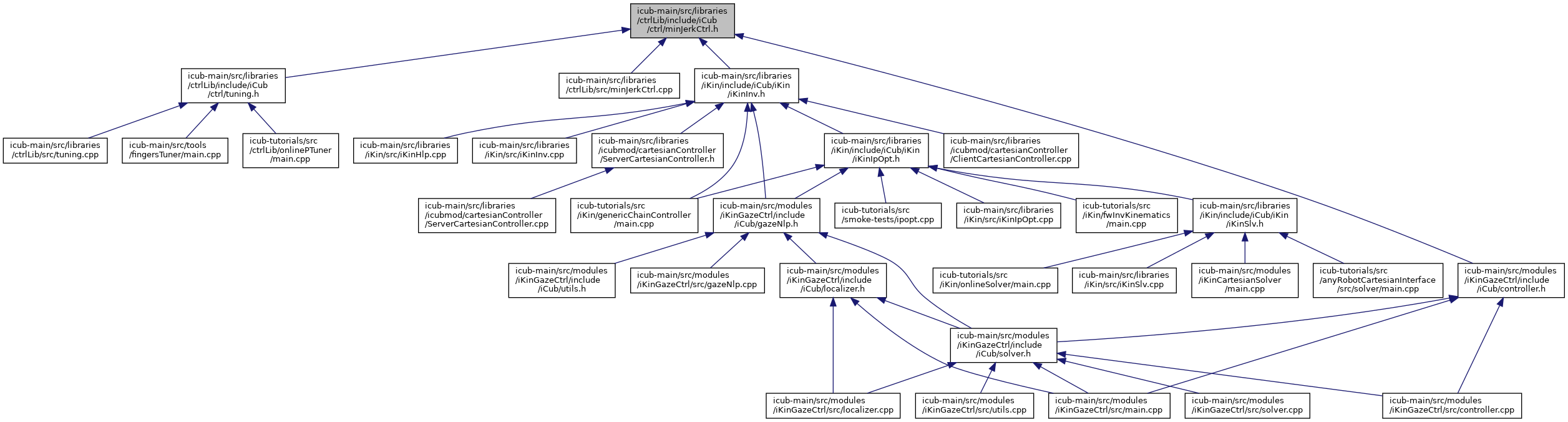
Go to the source code of this file.
Classes | |
| class | iCub::ctrl::minJerkVelCtrl |
| Abstract class for minimum-jerk controllers with velocity commands. More... | |
| class | iCub::ctrl::minJerkVelCtrlForIdealPlant |
| Implements a minimum-jerk controller with velocity commands in the assumption that the plant can be modelled as a pure integrator 1/s. More... | |
| class | iCub::ctrl::minJerkVelCtrlForNonIdealPlant |
| Implements a minimum-jerk controller with velocity commands assuming a non ideal plant represented with a pure integrator followed by a system with one zero and two poles (real or underdamped), such that the overall transfer function is (1/s)*(Kp*(1+Tz*s)/(1+2*Zeta*Tw*s+(Tw*s)^2)). More... | |
| class | iCub::ctrl::minJerkBaseGen |
| Base class for minimum jerk generators. More... | |
| class | iCub::ctrl::minJerkTrajGen |
| Generator of approximately minimum jerk trajectories. More... | |
| class | iCub::ctrl::minJerkRefGen |
| Generator of position, velocity and acceleration references that are approximately minimum jerk. More... | |
Namespaces | |
| namespace | iCub |
| This file contains the definition of unique IDs for the body parts and the skin parts of the robot. | |
| namespace | iCub::ctrl |