#include <iCub/iKin/iKinInv.h> Include dependency graph for iKinIpOpt.h:
Include dependency graph for iKinIpOpt.h: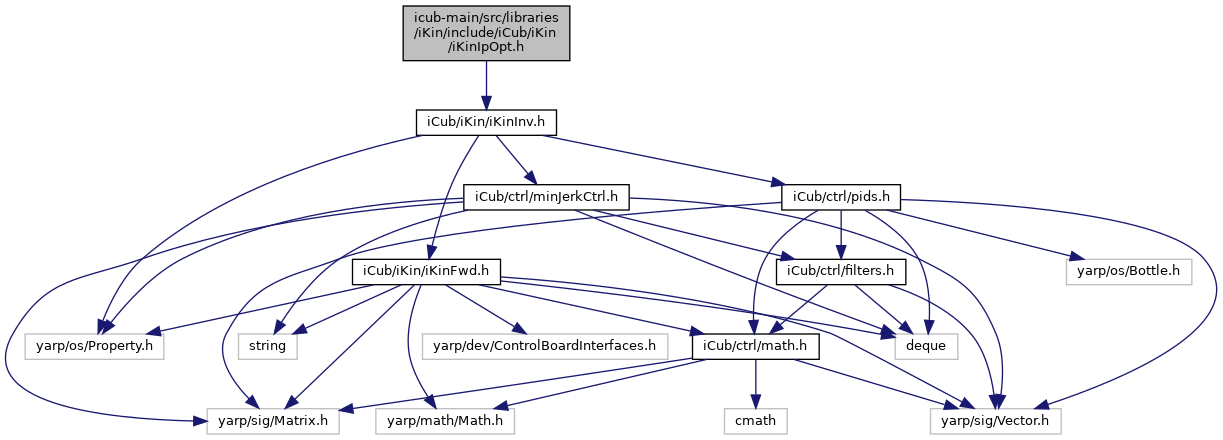 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: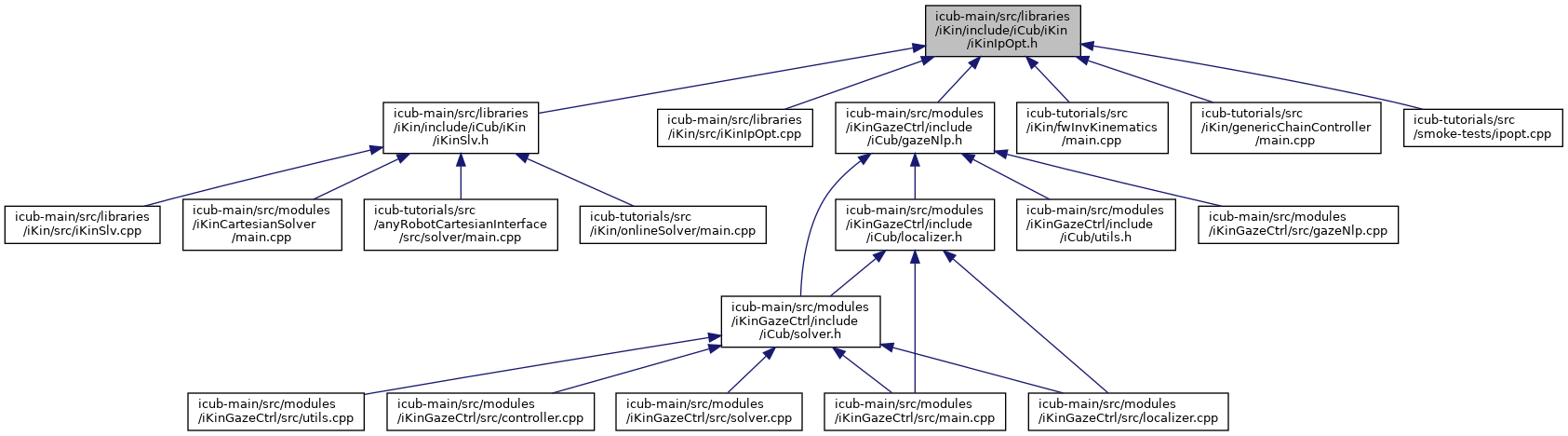
Go to the source code of this file.
Classes | |
| class | iCub::iKin::iKinIterateCallback |
| Class for defining iteration callback. More... | |
| class | iCub::iKin::iKinLinIneqConstr |
| Class for defining Linear Inequality Constraints of the form lB <= C*q <= uB for the nonlinear problem NLP. More... | |
| class | iCub::iKin::iCubAdditionalArmConstraints |
| Class for dealing with additional iCub arm's constraints. More... | |
| class | iCub::iKin::iKinIpOptMin |
| Class for inverting chain's kinematics based on IpOpt lib. More... | |
Namespaces | |
| namespace | iCub |
| This file contains the definition of unique IDs for the body parts and the skin parts of the robot. | |
| namespace | iCub::iKin |