#include <yarp/os/Property.h>
#include <iCub/ctrl/minJerkCtrl.h>
#include <iCub/ctrl/pids.h>
#include <iCub/iKin/iKinFwd.h>
Go to the source code of this file.
|
| namespace | iCub |
| | This file contains the definition of unique IDs for the body parts and the skin parts of the robot.
|
| |
| namespace | iCub::iKin |
| |
◆ IKINCTRL_DISABLED
| #define IKINCTRL_DISABLED -1 |
◆ IKINCTRL_POSE_ANG
| #define IKINCTRL_POSE_ANG 2 |
◆ IKINCTRL_POSE_FULL
| #define IKINCTRL_POSE_FULL 0 |
◆ IKINCTRL_POSE_XYZ
| #define IKINCTRL_POSE_XYZ 1 |
◆ IKINCTRL_RET_EXHALT
| #define IKINCTRL_RET_EXHALT 4 |
◆ IKINCTRL_RET_MAXITER
| #define IKINCTRL_RET_MAXITER 3 |
◆ IKINCTRL_RET_TOLQ
| #define IKINCTRL_RET_TOLQ 2 |
◆ IKINCTRL_RET_TOLSIZE
| #define IKINCTRL_RET_TOLSIZE 1 |
◆ IKINCTRL_RET_TOLX
| #define IKINCTRL_RET_TOLX 0 |
◆ IKINCTRL_STATE_DEADLOCK
| #define IKINCTRL_STATE_DEADLOCK 2 |
◆ IKINCTRL_STATE_INTARGET
| #define IKINCTRL_STATE_INTARGET 1 |
◆ IKINCTRL_STATE_RUNNING
| #define IKINCTRL_STATE_RUNNING 0 |
◆ IKINCTRL_STEEP_JT
| #define IKINCTRL_STEEP_JT 0 |
◆ IKINCTRL_STEEP_PINV
| #define IKINCTRL_STEEP_PINV 1 |
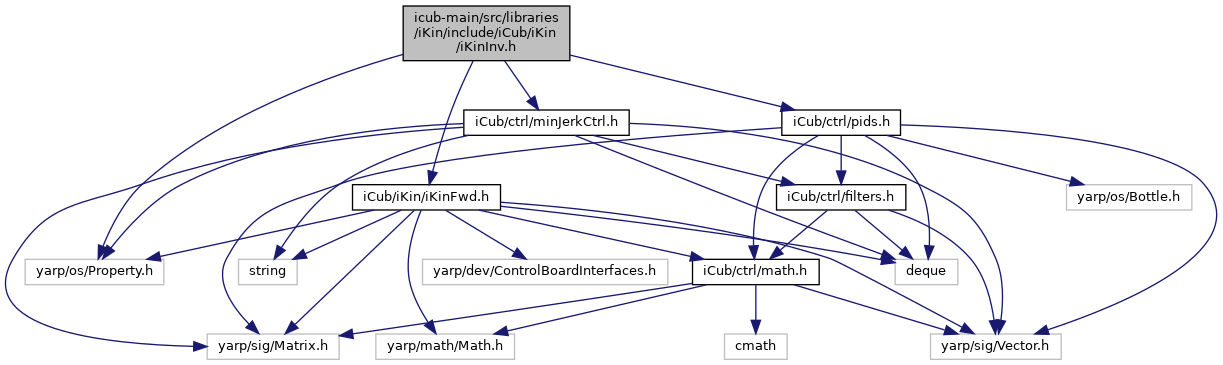
 Include dependency graph for iKinInv.h:
Include dependency graph for iKinInv.h: