#include <iostream>#include <string>#include <deque>#include <yarp/os/Property.h>#include <yarp/sig/Vector.h>#include <iCub/ctrl/math.h> Include dependency graph for neuralNetworks.h:
Include dependency graph for neuralNetworks.h: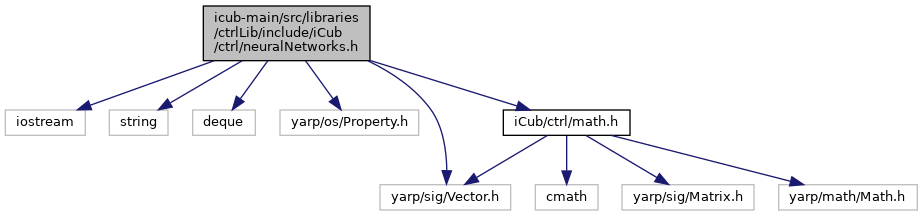 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: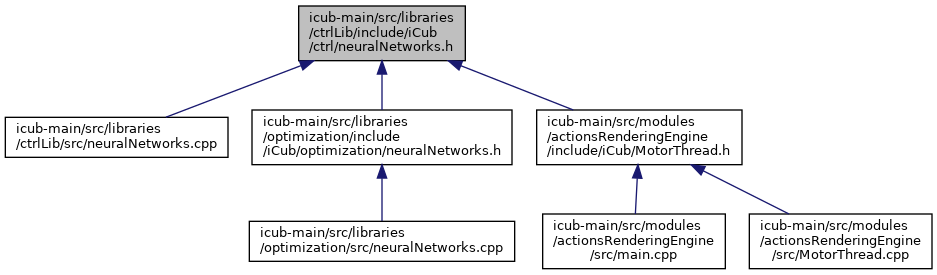
Go to the source code of this file.
Classes | |
| class | iCub::ctrl::ff2LayNN |
| Feed-Forward 2 layers Neural Network. More... | |
| struct | iCub::ctrl::ff2LayNN::minmax |
| class | iCub::ctrl::ff2LayNN_tansig_purelin |
| Feed-Forward 2 layers Neural Network with a tansig function for the hidden nodes and a purelin for the output nodes. More... | |
Namespaces | |
| namespace | iCub |
| This file contains the definition of unique IDs for the body parts and the skin parts of the robot. | |
| namespace | iCub::ctrl |