This class implements the server part of the fake motor device driver.
More...
#include <fakeMotorDeviceComponents.h>
|
| | fakeMotorDeviceServer () |
| |
| bool | open (yarp::os::Searchable &config) |
| |
| bool | close () |
| |
| bool | getLimits (int axis, double *min, double *max) |
| |
| bool | setLimits (int, double, double) |
| |
| bool | setVelLimits (int, double, double) |
| |
| bool | getVelLimits (int, double *, double *) |
| |
| bool | getAxes (int *ax) |
| |
| bool | getEncoder (int, double *) |
| |
| bool | getEncoders (double *) |
| |
| bool | resetEncoder (int) |
| |
| bool | resetEncoders () |
| |
| bool | setEncoder (int, double) |
| |
| bool | setEncoders (const double *) |
| |
| bool | getEncoderSpeed (int, double *) |
| |
| bool | getEncoderSpeeds (double *) |
| |
| bool | getEncoderAcceleration (int, double *) |
| |
| bool | getEncoderAccelerations (double *) |
| |
| bool | velocityMove (int j, double sp) |
| |
| bool | setRefAcceleration (int j, double acc) |
| |
| bool | stop (int j) |
| |
| bool | velocityMove (const int, const int *, const double *) |
| |
| bool | velocityMove (const double *) |
| |
| bool | setRefAccelerations (const int, const int *, const double *) |
| |
| bool | setRefAccelerations (const double *) |
| |
| bool | getRefAccelerations (const int, const int *, double *) |
| |
| bool | getRefAcceleration (int, double *) |
| |
| bool | getRefAccelerations (double *) |
| |
| bool | stop (const int, const int *) |
| |
| bool | stop () |
| |
|
| void | run () |
| |
| bool | read (yarp::os::ConnectionReader &connection) |
| | This method decodes the requests forwarded by the client and responds with corresponding replies.
|
| |
This class implements the server part of the fake motor device driver.
Only the used interface methods are actually implemented.
Definition at line 33 of file fakeMotorDeviceComponents.h.
◆ fakeMotorDeviceServer()
| fakeMotorDeviceServer::fakeMotorDeviceServer |
( |
| ) |
|
◆ close()
| bool fakeMotorDeviceServer::close |
( |
| ) |
|
◆ getAxes()
| bool fakeMotorDeviceServer::getAxes |
( |
int * |
ax | ) |
|
◆ getEncoder()
| bool fakeMotorDeviceServer::getEncoder |
( |
int |
, |
|
|
double * |
|
|
) |
| |
|
inline |
◆ getEncoderAcceleration()
| bool fakeMotorDeviceServer::getEncoderAcceleration |
( |
int |
, |
|
|
double * |
|
|
) |
| |
|
inline |
◆ getEncoderAccelerations()
| bool fakeMotorDeviceServer::getEncoderAccelerations |
( |
double * |
| ) |
|
|
inline |
◆ getEncoders()
| bool fakeMotorDeviceServer::getEncoders |
( |
double * |
| ) |
|
|
inline |
◆ getEncoderSpeed()
| bool fakeMotorDeviceServer::getEncoderSpeed |
( |
int |
, |
|
|
double * |
|
|
) |
| |
|
inline |
◆ getEncoderSpeeds()
| bool fakeMotorDeviceServer::getEncoderSpeeds |
( |
double * |
| ) |
|
|
inline |
◆ getLimits()
| bool fakeMotorDeviceServer::getLimits |
( |
int |
axis, |
|
|
double * |
min, |
|
|
double * |
max |
|
) |
| |
◆ getRefAcceleration()
| bool fakeMotorDeviceServer::getRefAcceleration |
( |
int |
, |
|
|
double * |
|
|
) |
| |
|
inline |
◆ getRefAccelerations() [1/2]
| bool fakeMotorDeviceServer::getRefAccelerations |
( |
const int |
, |
|
|
const int * |
, |
|
|
double * |
|
|
) |
| |
|
inline |
◆ getRefAccelerations() [2/2]
| bool fakeMotorDeviceServer::getRefAccelerations |
( |
double * |
| ) |
|
|
inline |
◆ getVelLimits()
| bool fakeMotorDeviceServer::getVelLimits |
( |
int |
, |
|
|
double * |
, |
|
|
double * |
|
|
) |
| |
|
inline |
◆ open()
| bool fakeMotorDeviceServer::open |
( |
yarp::os::Searchable & |
config | ) |
|
◆ read()
| bool fakeMotorDeviceServer::read |
( |
yarp::os::ConnectionReader & |
connection | ) |
|
|
protected |
This method decodes the requests forwarded by the client and responds with corresponding replies.
Definition at line 123 of file fakeMotorDeviceServer.cpp.
◆ resetEncoder()
| bool fakeMotorDeviceServer::resetEncoder |
( |
int |
| ) |
|
|
inline |
◆ resetEncoders()
| bool fakeMotorDeviceServer::resetEncoders |
( |
| ) |
|
|
inline |
◆ run()
| void fakeMotorDeviceServer::run |
( |
| ) |
|
|
protected |
◆ setEncoder()
| bool fakeMotorDeviceServer::setEncoder |
( |
int |
, |
|
|
double |
|
|
) |
| |
|
inline |
◆ setEncoders()
| bool fakeMotorDeviceServer::setEncoders |
( |
const double * |
| ) |
|
|
inline |
◆ setLimits()
| bool fakeMotorDeviceServer::setLimits |
( |
int |
, |
|
|
double |
, |
|
|
double |
|
|
) |
| |
|
inline |
◆ setRefAcceleration()
| bool fakeMotorDeviceServer::setRefAcceleration |
( |
int |
j, |
|
|
double |
acc |
|
) |
| |
◆ setRefAccelerations() [1/2]
| bool fakeMotorDeviceServer::setRefAccelerations |
( |
const double * |
| ) |
|
|
inline |
◆ setRefAccelerations() [2/2]
| bool fakeMotorDeviceServer::setRefAccelerations |
( |
const int |
, |
|
|
const int * |
, |
|
|
const double * |
|
|
) |
| |
|
inline |
◆ setVelLimits()
| bool fakeMotorDeviceServer::setVelLimits |
( |
int |
, |
|
|
double |
, |
|
|
double |
|
|
) |
| |
|
inline |
◆ stop() [1/3]
| bool fakeMotorDeviceServer::stop |
( |
| ) |
|
|
inline |
◆ stop() [2/3]
| bool fakeMotorDeviceServer::stop |
( |
const int |
, |
|
|
const int * |
|
|
) |
| |
|
inline |
◆ stop() [3/3]
| bool fakeMotorDeviceServer::stop |
( |
int |
j | ) |
|
◆ velocityMove() [1/3]
| bool fakeMotorDeviceServer::velocityMove |
( |
const double * |
| ) |
|
|
inline |
◆ velocityMove() [2/3]
| bool fakeMotorDeviceServer::velocityMove |
( |
const int |
, |
|
|
const int * |
, |
|
|
const double * |
|
|
) |
| |
|
inline |
◆ velocityMove() [3/3]
| bool fakeMotorDeviceServer::velocityMove |
( |
int |
j, |
|
|
double |
sp |
|
) |
| |
◆ cmdPort
| yarp::os::BufferedPort<yarp::os::Bottle> fakeMotorDeviceServer::cmdPort |
|
protected |
◆ configured
| bool fakeMotorDeviceServer::configured |
|
protected |
◆ motors
◆ mtx
| std::mutex fakeMotorDeviceServer::mtx |
|
protected |
◆ rpcPort
| yarp::os::Port fakeMotorDeviceServer::rpcPort |
|
protected |
◆ statePort
| yarp::os::BufferedPort<yarp::sig::Vector> fakeMotorDeviceServer::statePort |
|
protected |
◆ vel
| yarp::sig::Vector fakeMotorDeviceServer::vel |
|
protected |
The documentation for this class was generated from the following files:
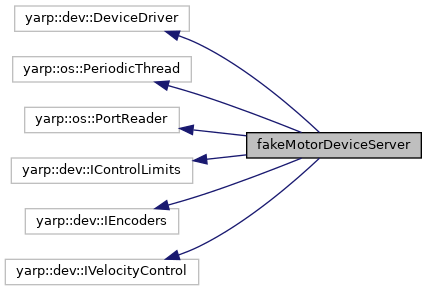
 Inheritance diagram for fakeMotorDeviceServer:
Inheritance diagram for fakeMotorDeviceServer: