#include <yarp/os/all.h>#include <yarp/sig/all.h>#include <iCub/perception/sensors.h>#include <iCub/perception/nodes.h>#include <iCub/perception/models.h> Include dependency graph for tactileFingers.h:
Include dependency graph for tactileFingers.h: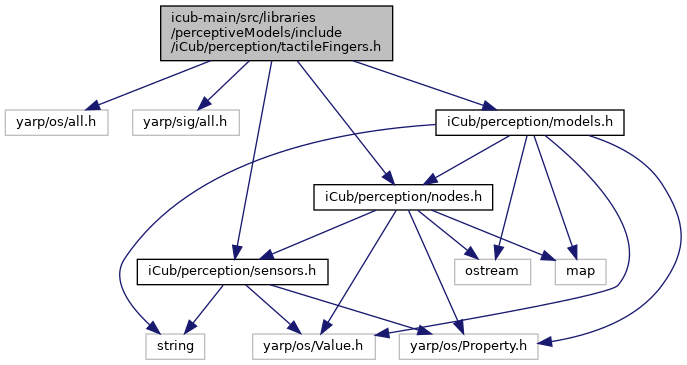 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: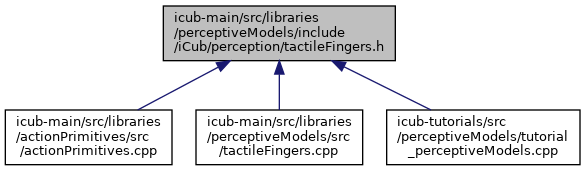
Go to the source code of this file.
Classes | |
| class | iCub::perception::TactileFinger |
| An implementation of the Node class that represents the tactile finger. More... | |
| class | iCub::perception::TactileFingersModel |
| A class that provides a mesaure of contact detection for each finger relying on tactile sensors. More... | |
Namespaces | |
| namespace | iCub |
| This file contains the definition of unique IDs for the body parts and the skin parts of the robot. | |
| namespace | iCub::perception |