#include <cmath>
#include <iostream>
#include <iomanip>
#include <string>
#include <yarp/os/all.h>
#include <yarp/sig/all.h>
#include <yarp/dev/all.h>
#include <iCub/ctrl/math.h>
#include <iCub/ctrl/adaptWinPolyEstimator.h>
#include <iCub/iDyn/iDyn.h>
#include <iCub/iDyn/iDynBody.h>
#include <iCub/skinDynLib/skinContact.h>
#include "observerThread.h"
Go to the source code of this file.
◆ MEASURE_FROM_FOOT
| #define MEASURE_FROM_FOOT |
◆ TEST_LEG_SENSOR
◆ lpf_ord1_3hz()
| double lpf_ord1_3hz |
( |
double |
input, |
|
|
int |
j |
|
) |
| |
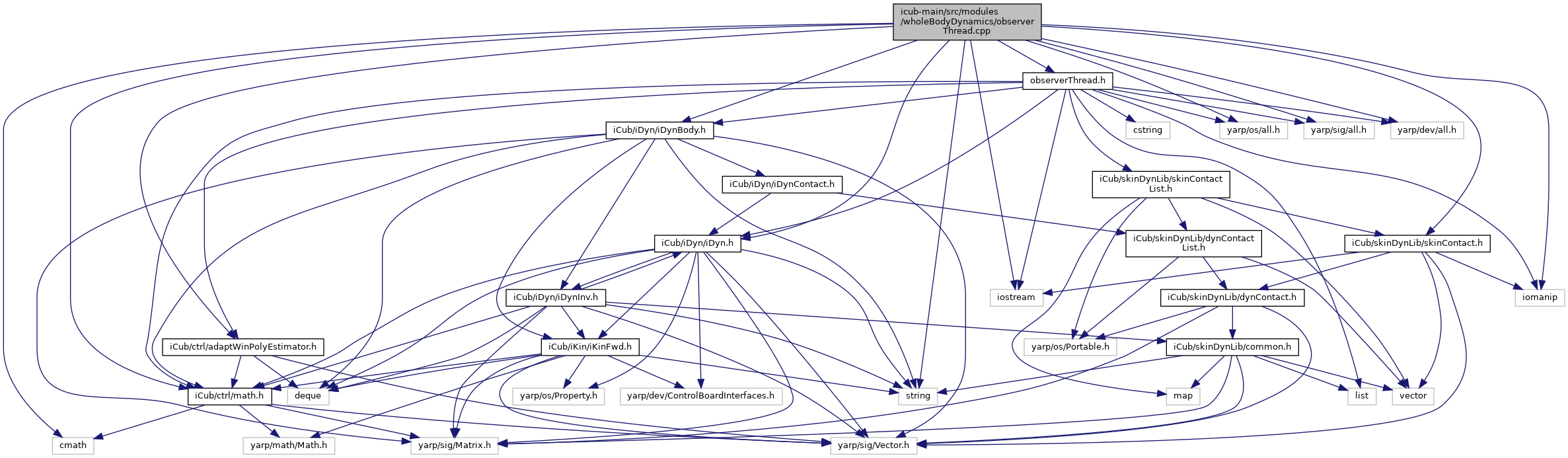
 Include dependency graph for observerThread.cpp:
Include dependency graph for observerThread.cpp: