|
| BodyPart | iCub::skinDynLib::getBodyPart (SkinPart s) |
| | Get the body part associated to the specified skin part.
|
| |
| std::vector< SkinPart > | iCub::skinDynLib::getSkinParts (BodyPart b) |
| | Get the list of skin parts associated to the specified body part.
|
| |
| int | iCub::skinDynLib::getLinkNum (SkinPart s) |
| | Get the link number associated to the specified skin part.
|
| |
| SkinPart | iCub::skinDynLib::getSkinPartFromString (const std::string skinPartString) |
| | Get the SkinPart enum from the string version - essentially the opposite of SkinPart_s[].
|
| |
| yarp::sig::Vector | iCub::skinDynLib::toVector (yarp::sig::Matrix m) |
| | Converts a yarp::sig::Matrix to a yarp::sig::Vector.
|
| |
| yarp::sig::Vector | iCub::skinDynLib::vectorFromBottle (const yarp::os::Bottle b, int in, const int size) |
| | Retrieves a vector from a bottle.
|
| |
| void | iCub::skinDynLib::vectorIntoBottle (const yarp::sig::Vector v, yarp::os::Bottle &b) |
| | Puts a Vector into a bottle, by cycling through its elements and adding them as doubles.
|
| |
| yarp::sig::Matrix | iCub::skinDynLib::matrixFromBottle (const yarp::os::Bottle b, int in, const int r, const int c) |
| | Retrieves a matrix from a bottle.
|
| |
| void | iCub::skinDynLib::matrixIntoBottle (const yarp::sig::Matrix m, yarp::os::Bottle &b) |
| | Puts a matrix into a bottle, by cycling through its elements and adding them as double.
|
| |
| std::list< unsigned int > | iCub::skinDynLib::vectorofIntEqualto (const std::vector< int > vec, const int val) |
| | Returns a list of indexes corresponding to the values of vec that are equal to val.
|
| |
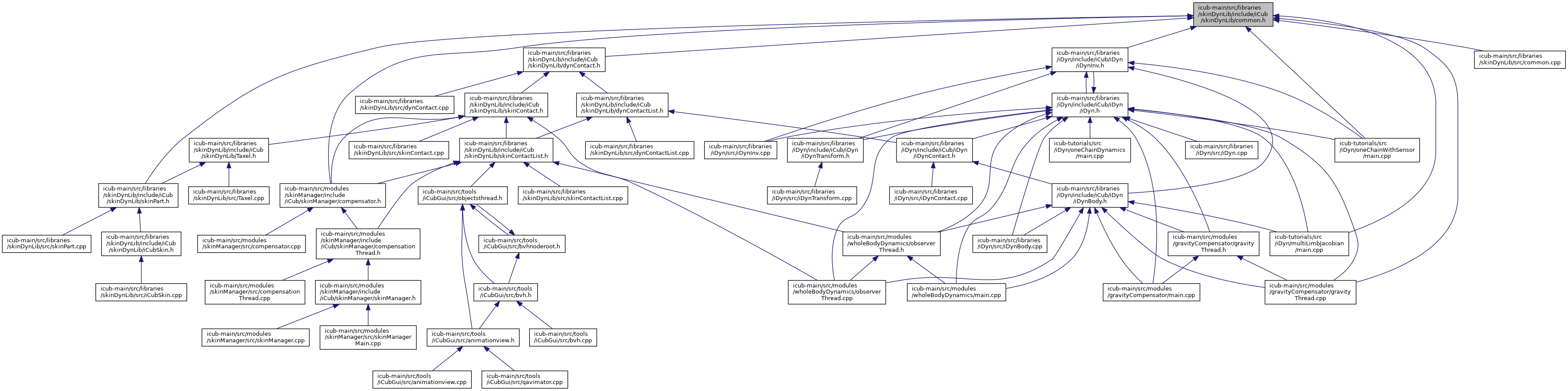
 Include dependency graph for common.h:
Include dependency graph for common.h: