Coupling law from https://icub-tech-iit.github.io/documentation/icub_kinematics/icub-vergence-version/icub-vergence-version/.
More...
#include <CouplingICubEye.h>
|
| | CouplingICubEye ()=default |
| |
| virtual | ~CouplingICubEye () override=default |
| |
| bool | convertFromPhysicalJointsToActuatedAxesPos (const yarp::sig::Vector &physJointsPos, yarp::sig::Vector &actAxesPos) override |
| |
| bool | convertFromPhysicalJointsToActuatedAxesVel (const yarp::sig::Vector &physJointsPos, const yarp::sig::Vector &physJointsVel, yarp::sig::Vector &actAxesVel) override |
| |
| bool | convertFromPhysicalJointsToActuatedAxesAcc (const yarp::sig::Vector &physJointsPos, const yarp::sig::Vector &physJointsVel, const yarp::sig::Vector &physJointsAcc, yarp::sig::Vector &actAxesAcc) override |
| |
| bool | convertFromPhysicalJointsToActuatedAxesTrq (const yarp::sig::Vector &physJointsPos, const yarp::sig::Vector &physJointsTrq, yarp::sig::Vector &actAxesTrq) override |
| |
| bool | convertFromActuatedAxesToPhysicalJointsPos (const yarp::sig::Vector &actAxesPos, yarp::sig::Vector &physJointsPos) override |
| |
| bool | convertFromActuatedAxesToPhysicalJointsVel (const yarp::sig::Vector &actAxesPos, const yarp::sig::Vector &actAxesVel, yarp::sig::Vector &physJointsVel) override |
| |
| bool | convertFromActuatedAxesToPhysicalJointsAcc (const yarp::sig::Vector &actAxesPos, const yarp::sig::Vector &actAxesVel, const yarp::sig::Vector &actAxesAcc, yarp::sig::Vector &physJointsAcc) override |
| |
| bool | convertFromActuatedAxesToPhysicalJointsTrq (const yarp::sig::Vector &actAxesPos, const yarp::sig::Vector &actAxesTrq, yarp::sig::Vector &physJointsTrq) override |
| |
| bool | open (yarp::os::Searchable &config) override |
| | Configure with a set of options.
|
| |
| | CouplingICubEye_ParamsParser () |
| |
| | ~CouplingICubEye_ParamsParser () override=default |
| |
| bool | parseParams (const yarp::os::Searchable &config) override |
| |
| std::string | getDeviceClassName () const override |
| |
| std::string | getDeviceName () const override |
| |
| std::string | getDocumentationOfDeviceParams () const override |
| |
| std::vector< std::string > | getListOfParams () const override |
| |
| bool | getParamValue (const std::string ¶mName, std::string ¶mValue) const override |
| |
| std::string | getConfiguration () const override |
| |
◆ CouplingICubEye()
| CouplingICubEye::CouplingICubEye |
( |
| ) |
|
|
default |
◆ ~CouplingICubEye()
| virtual CouplingICubEye::~CouplingICubEye |
( |
| ) |
|
|
overridevirtualdefault |
◆ convertFromActuatedAxesToPhysicalJointsAcc()
| bool CouplingICubEye::convertFromActuatedAxesToPhysicalJointsAcc |
( |
const yarp::sig::Vector & |
actAxesPos, |
|
|
const yarp::sig::Vector & |
actAxesVel, |
|
|
const yarp::sig::Vector & |
actAxesAcc, |
|
|
yarp::sig::Vector & |
physJointsAcc |
|
) |
| |
|
override |
◆ convertFromActuatedAxesToPhysicalJointsPos()
| bool CouplingICubEye::convertFromActuatedAxesToPhysicalJointsPos |
( |
const yarp::sig::Vector & |
actAxesPos, |
|
|
yarp::sig::Vector & |
physJointsPos |
|
) |
| |
|
override |
◆ convertFromActuatedAxesToPhysicalJointsTrq()
| bool CouplingICubEye::convertFromActuatedAxesToPhysicalJointsTrq |
( |
const yarp::sig::Vector & |
actAxesPos, |
|
|
const yarp::sig::Vector & |
actAxesTrq, |
|
|
yarp::sig::Vector & |
physJointsTrq |
|
) |
| |
|
override |
◆ convertFromActuatedAxesToPhysicalJointsVel()
| bool CouplingICubEye::convertFromActuatedAxesToPhysicalJointsVel |
( |
const yarp::sig::Vector & |
actAxesPos, |
|
|
const yarp::sig::Vector & |
actAxesVel, |
|
|
yarp::sig::Vector & |
physJointsVel |
|
) |
| |
|
override |
◆ convertFromPhysicalJointsToActuatedAxesAcc()
| bool CouplingICubEye::convertFromPhysicalJointsToActuatedAxesAcc |
( |
const yarp::sig::Vector & |
physJointsPos, |
|
|
const yarp::sig::Vector & |
physJointsVel, |
|
|
const yarp::sig::Vector & |
physJointsAcc, |
|
|
yarp::sig::Vector & |
actAxesAcc |
|
) |
| |
|
override |
◆ convertFromPhysicalJointsToActuatedAxesPos()
| bool CouplingICubEye::convertFromPhysicalJointsToActuatedAxesPos |
( |
const yarp::sig::Vector & |
physJointsPos, |
|
|
yarp::sig::Vector & |
actAxesPos |
|
) |
| |
|
override |
◆ convertFromPhysicalJointsToActuatedAxesTrq()
| bool CouplingICubEye::convertFromPhysicalJointsToActuatedAxesTrq |
( |
const yarp::sig::Vector & |
physJointsPos, |
|
|
const yarp::sig::Vector & |
physJointsTrq, |
|
|
yarp::sig::Vector & |
actAxesTrq |
|
) |
| |
|
override |
◆ convertFromPhysicalJointsToActuatedAxesVel()
| bool CouplingICubEye::convertFromPhysicalJointsToActuatedAxesVel |
( |
const yarp::sig::Vector & |
physJointsPos, |
|
|
const yarp::sig::Vector & |
physJointsVel, |
|
|
yarp::sig::Vector & |
actAxesVel |
|
) |
| |
|
override |
◆ open()
| bool CouplingICubEye::open |
( |
yarp::os::Searchable & |
config | ) |
|
|
override |
Configure with a set of options.
- Parameters
-
- Returns
- true iff the object could be configured.
Definition at line 33 of file CouplingICubEye.cpp.
The documentation for this class was generated from the following files:
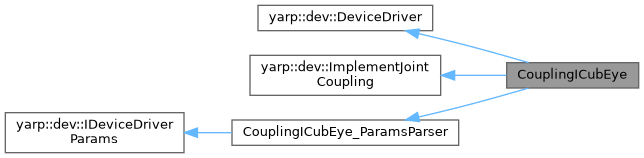
 Inheritance diagram for CouplingICubEye:
Inheritance diagram for CouplingICubEye: