 Include dependency graph for iDynContact.h:
Include dependency graph for iDynContact.h: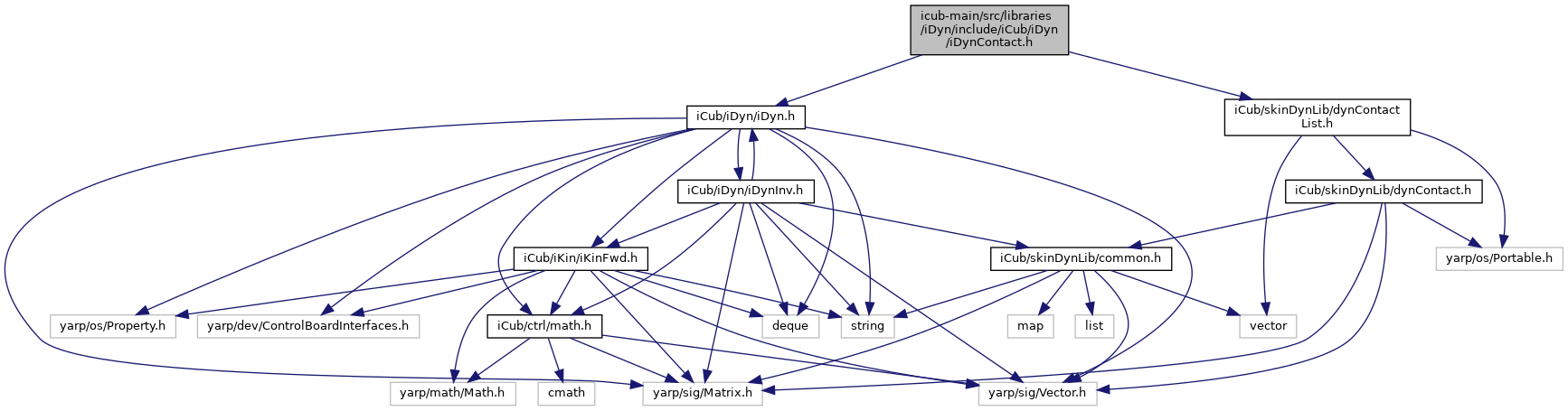 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: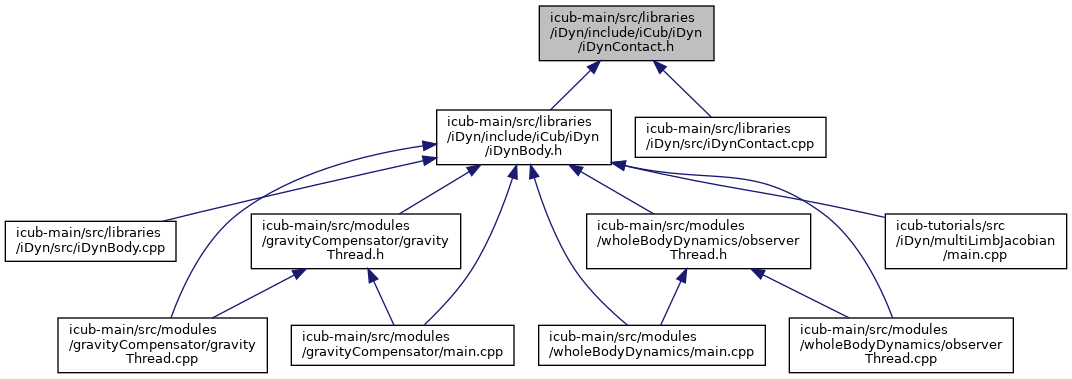
Go to the source code of this file.
Classes | |
| class | iCub::iDyn::iDynContactSolver |
| This solver uses a modified version of the Newton-Euler algorithm to estimate both the external and internal forces/moments of a single kinematic chain. More... | |
Namespaces | |
| namespace | iCub |
| This file contains the definition of unique IDs for the body parts and the skin parts of the robot. | |
| namespace | iCub::iDyn |
Variables | |
| static double const | iCub::iDyn::TOLLERANCE = 10e-08 |