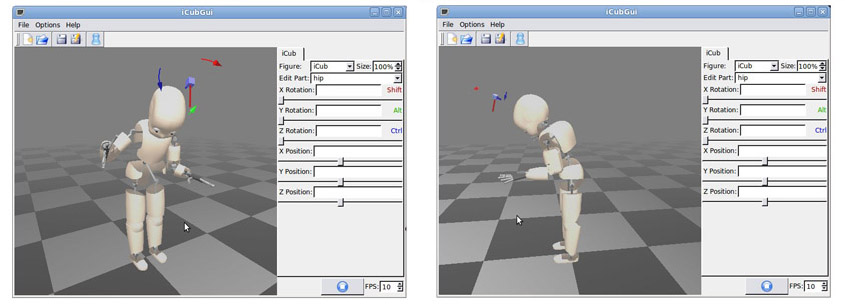
A gui that shows the full state of the robot.
 Collaboration diagram for iCubGui:
Collaboration diagram for iCubGui:
A gui that shows the full state of the robot.
At the moment encoders and inertial sensors.
Description
Display a kinematic model of the robot from the encoders. It also shows a representation of the output of the inertial sensor.
Vision objects
iCubGui can also display data blobs from vision modules, representing them as 3D ellipsoids characterized by name, dimensions, color, transparency, position and orientation. Objects in iCubGui are managed by a port specified in the iCubGui.ini configuration file with the tag objport, as follows:
To add an object to the display object list, send to iCubGui a bottle composed as following on the port specified in iCubGui.ini:
To delete an object:
To reset the object list:
Libraries
- YARP
- Qt5, glut, opengl.
Parameters
None.
Ports Accessed
Needs access to all the robot interfaces and ports (from iCubInterface).
Tested OS
Linux and Windows.
Copyright (C) 2009 RobotCub Consortium
CopyPolicy: Released under the terms of the GNU GPL v2.0.
This file can be edited at src/gui/iCubGui/src/main.cpp.