#include <string>#include <mutex>#include <math.h>#include <yarp/os/Bottle.h>#include <yarp/os/BufferedPort.h>#include <yarp/os/Timer.h>#include <yarp/dev/DeviceDriver.h>#include <yarp/dev/PolyDriver.h>#include <yarp/dev/ControlBoardHelper.h>#include <yarp/dev/IVirtualAnalogSensor.h>#include <yarp/dev/ImplementJointFault.h>#include <abstractEthResource.h>#include <iCub/IRawValuesPublisher.h>#include "IethResource.h"#include "EoError.h"#include <ethManager.h>#include "serviceParser.h"#include "eomcParser.h"#include "measuresConverter.h"#include "mcEventDownsampler.h"#include "ethParser.h" Include dependency graph for embObjMotionControl.h:
Include dependency graph for embObjMotionControl.h: This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: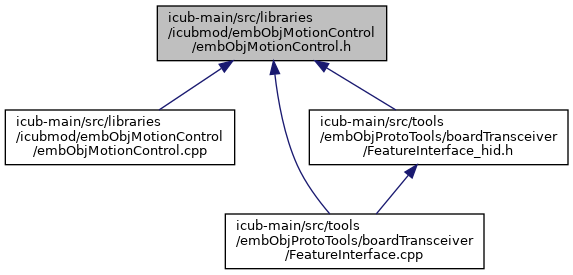
Go to the source code of this file.
Classes | |
| struct | yarp::dev::eomc::jointsetsInfo_t |
| struct | yarp::dev::eomc::encoder_t |
| struct | yarp::dev::eomc::behaviour_flags_t |
| struct | yarp::dev::eomc::maintenanceModeCfg_t |
| class | yarp::dev::eomc::Watchdog |
| class | yarp::dev::eomc::TemperatureFilter |
| struct | MCdiagnostics |
| class | yarp::dev::embObjMotionControl |
embObjMotionControl : driver for iCub motor control boards EMS on a ETH bus. More... | |
Namespaces | |
| namespace | yarp |
| Copyright (C) 2008 RobotCub Consortium. | |
| namespace | yarp::dev |
| namespace | yarp::dev::eomc |
Macros | |
| #define | EMBOBJMC_DONT_USE_MAIS |
| #define | MAX_POSITION_MOVE_INTERVAL 0.080 |
Macro Definition Documentation
◆ EMBOBJMC_DONT_USE_MAIS
| #define EMBOBJMC_DONT_USE_MAIS |
Definition at line 82 of file embObjMotionControl.h.
◆ MAX_POSITION_MOVE_INTERVAL
| #define MAX_POSITION_MOVE_INTERVAL 0.080 |
Definition at line 356 of file embObjMotionControl.h.