|
| | iCubLegCartesianSolver (const std::string &_slvName="legCartSolver") |
| | Constructor.
|
| |
| | CartesianSolver (const std::string &_slvName) |
| | Constructor.
|
| |
| virtual bool | open (yarp::os::Searchable &options) |
| | Configure the solver and start it up.
|
| |
| virtual void | interrupt () |
| | Interrupt the open() method waiting for motor parts to be ready.
|
| |
| virtual void | close () |
| | Stop the solver and dispose it.
|
| |
| virtual bool | isClosed () const |
| | To be called to check whether the solver has received a [quit] request.
|
| |
| virtual bool & | getTimeoutFlag () |
| | To be called to check whether communication timeout has been detected.
|
| |
| virtual void | suspend () |
| | Suspend the solver's main loop.
|
| |
| virtual void | resume () |
| | Resume the solver's main loop.
|
| |
| virtual | ~CartesianSolver () |
| | Default destructor.
|
| |
|
| virtual PartDescriptor * | getPartDesc (yarp::os::Searchable &options) |
| |
| virtual yarp::sig::Vector | solve (yarp::sig::Vector &xd) |
| |
| virtual yarp::sig::Vector & | encodeDOF () |
| |
| virtual bool | decodeDOF (const yarp::sig::Vector &_dof) |
| |
| virtual bool | handleJointsRestPosition (const yarp::os::Bottle *options, yarp::os::Bottle *reply=NULL) |
| |
| virtual bool | handleJointsRestWeights (const yarp::os::Bottle *options, yarp::os::Bottle *reply=NULL) |
| |
| yarp::dev::PolyDriver * | waitPart (const yarp::os::Property &partOpt) |
| |
| bool | isNewDOF (const yarp::sig::Vector &_dof) |
| |
| bool | changeDOF (const yarp::sig::Vector &_dof) |
| |
| bool | alignJointsBounds () |
| |
| bool | setLimits (int axis, double min, double max) |
| |
| void | countUncontrolledJoints () |
| |
| void | latchUncontrolledJoints (yarp::sig::Vector &joints) |
| |
| void | getFeedback (const bool wait=false) |
| |
| void | initPos () |
| |
| void | lock () |
| |
| void | unlock () |
| |
| void | waitDOFHandling () |
| |
| void | postDOFHandling () |
| |
| void | fillDOFInfo (yarp::os::Bottle &reply) |
| |
| void | send (const yarp::sig::Vector &xd, const yarp::sig::Vector &x, const yarp::sig::Vector &q, double *tok) |
| |
| void | printInfo (const std::string &typ, const yarp::sig::Vector &xd, const yarp::sig::Vector &x, const yarp::sig::Vector &q, const double t) |
| |
| virtual void | prepareJointsRestTask () |
| |
| virtual void | respond (const yarp::os::Bottle &command, yarp::os::Bottle &reply) |
| |
| virtual bool | threadInit () |
| |
| virtual void | afterStart (bool) |
| |
| virtual void | run () |
| |
| virtual void | threadRelease () |
| |
|
| static void | addVectorOption (yarp::os::Bottle &b, const int vcb, const yarp::sig::Vector &v) |
| |
| static bool | getDesiredOption (const yarp::os::Bottle &reply, yarp::sig::Vector &xdhat, yarp::sig::Vector &odhat, yarp::sig::Vector &qdhat) |
| |
| static void | addTargetOption (yarp::os::Bottle &b, const yarp::sig::Vector &xd) |
| | Appends to a bottle all data needed to command a target.
|
| |
| static void | addDOFOption (yarp::os::Bottle &b, const yarp::sig::Vector &dof) |
| | Appends to a bottle all data needed to reconfigure chain's dof.
|
| |
| static void | addJointsResPosOption (yarp::os::Bottle &b, const yarp::sig::Vector &restPos) |
| | Appends to a bottle all data needed to modify joints rest position.
|
| |
| static void | addJointsRestWeightsOption (yarp::os::Bottle &b, const yarp::sig::Vector &restWeights) |
| | Appends to a bottle all data needed to modify joints rest weights.
|
| |
| static void | addPoseOption (yarp::os::Bottle &b, const unsigned int pose) |
| | Appends to a bottle all data needed to change the pose mode.
|
| |
| static void | addModeOption (yarp::os::Bottle &b, const bool tracking) |
| | Appends to a bottle all data needed to change the tracking mode.
|
| |
| static void | addTokenOption (yarp::os::Bottle &b, const double token) |
| | Appends to a bottle a token to be exchanged with the solver.
|
| |
| static yarp::os::Bottle * | getTargetOption (const yarp::os::Bottle &b) |
| | Retrieves commanded target data from a bottle.
|
| |
| static yarp::os::Bottle * | getEndEffectorPoseOption (const yarp::os::Bottle &b) |
| | Retrieves the end-effector pose data.
|
| |
| static yarp::os::Bottle * | getJointsOption (const yarp::os::Bottle &b) |
| | Retrieves the joints configuration data.
|
| |
| static bool | getTokenOption (const yarp::os::Bottle &b, double *token) |
| | Retrieves the token from the bottle.
|
| |
| static bool | computeFixationPointData (iKinChain &eyeL, iKinChain &eyeR, yarp::sig::Vector &fp) |
| | Retrieves current fixation point given the current kinematics configuration of the eyes.
|
| |
| static bool | computeFixationPointData (iKinChain &eyeL, iKinChain &eyeR, yarp::sig::Vector &fp, yarp::sig::Matrix &J) |
| | Retrieves current fixation point and its Jacobian wrt eyes tilt-pan-vergence dofs given the current kinematics configuration of the eyes.
|
| |
| PartDescriptor * | prt |
| |
| std::deque< yarp::dev::PolyDriver * > | drv |
| |
| std::deque< yarp::dev::IControlLimits * > | lim |
| |
| std::deque< yarp::dev::IEncoders * > | enc |
| |
| std::deque< int > | jnt |
| |
| std::deque< int * > | rmp |
| |
| iKinIpOptMin * | slv |
| |
| SolverCallback * | clb |
| |
| RpcProcessor * | cmdProcessor |
| |
| yarp::os::Port * | rpcPort |
| |
| InputPort * | inPort |
| |
| yarp::os::BufferedPort< yarp::os::Bottle > * | outPort |
| |
| std::mutex | mtx |
| |
| std::string | slvName |
| |
| std::string | type |
| |
| unsigned int | period |
| |
| unsigned int | ctrlPose |
| |
| bool | fullDOF |
| |
| bool | contModeOld |
| |
| bool | configured |
| |
| bool | closing |
| |
| bool | closed |
| |
| bool | interrupting |
| |
| bool | verbosity |
| |
| bool | timeout_detected |
| |
| int | maxPartJoints |
| |
| int | unctrlJointsNum |
| |
| double | ping_robot_tmo |
| |
| double | token |
| |
| double * | pToken |
| |
| yarp::sig::Matrix | hwLimits |
| |
| yarp::sig::Matrix | swLimits |
| |
| yarp::sig::Vector | unctrlJointsOld |
| |
| yarp::sig::Vector | dof |
| |
| yarp::sig::Vector | restJntPos |
| |
| yarp::sig::Vector | restWeights |
| |
| yarp::sig::Vector | xd_2ndTask |
| |
| yarp::sig::Vector | w_2ndTask |
| |
| yarp::sig::Vector | qd_3rdTask |
| |
| yarp::sig::Vector | w_3rdTask |
| |
| yarp::sig::Vector | idx_3rdTask |
| |
| std::mutex | mtx_dofEvent |
| |
| std::condition_variable | cv_dofEvent |
| |
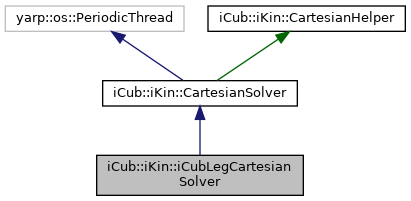
Derived class which implements the on-line solver for the leg chain.
Definition at line 609 of file iKinSlv.h.
 Inheritance diagram for iCub::iKin::iCubLegCartesianSolver:
Inheritance diagram for iCub::iKin::iCubLegCartesianSolver: