#include <embObjMultipleFTsensors.h>
|
| | embObjMultipleFTsensors () |
| |
| | embObjMultipleFTsensors (std::shared_ptr< yarp::dev::embObjDevPrivData > device) |
| |
| | ~embObjMultipleFTsensors () |
| |
| bool | open (yarp::os::Searchable &config) |
| |
| bool | close () |
| |
| virtual bool | initialised () |
| |
| virtual eth::iethresType_t | type () |
| |
| virtual bool | update (eOprotID32_t id32, double timestamp, void *rxdata) |
| |
| virtual size_t | getNrOfTemperatureSensors () const override |
| |
| virtual yarp::dev::MAS_status | getTemperatureSensorStatus (size_t sensorindex) const override |
| |
| virtual bool | getTemperatureSensorName (size_t sensorindex, std::string &name) const override |
| |
| virtual bool | getTemperatureSensorFrameName (size_t sensorindex, std::string &frameName) const override |
| |
| virtual bool | getTemperatureSensorMeasure (size_t sensorindex, double &out, double ×tamp) const override |
| |
| virtual bool | getTemperatureSensorMeasure (size_t sensorindex, yarp::sig::Vector &out, double ×tamp) const override |
| |
| virtual size_t | getNrOfSixAxisForceTorqueSensors () const override |
| |
| virtual yarp::dev::MAS_status | getSixAxisForceTorqueSensorStatus (size_t sensorindex) const override |
| |
| virtual bool | getSixAxisForceTorqueSensorName (size_t sensorindex, std::string &name) const override |
| |
| virtual bool | getSixAxisForceTorqueSensorFrameName (size_t sensorindex, std::string &frameName) const override |
| |
| virtual bool | getSixAxisForceTorqueSensorMeasure (size_t sensorindex, yarp::sig::Vector &out, double ×tamp) const override |
| |
| virtual | ~IethResource () |
| |
| const char * | stringOfType () |
| |
| virtual bool | getEntityName (uint32_t entityId, std::string &entityName) |
| |
| virtual bool | getEncoderTypeName (uint32_t jomoId, eOmc_position_t pos, std::string &encoderTypeName) |
| |
| virtual bool | getEntityControlModeName (uint32_t jomoId, eOenum08_t control_mode, std::string &controlModeName, eObool_t compact_string=eobool_true) |
| |
Definition at line 47 of file embObjMultipleFTsensors.h.
◆ embObjMultipleFTsensors() [1/2]
| embObjMultipleFTsensors::embObjMultipleFTsensors |
( |
| ) |
|
◆ embObjMultipleFTsensors() [2/2]
◆ ~embObjMultipleFTsensors()
| embObjMultipleFTsensors::~embObjMultipleFTsensors |
( |
| ) |
|
◆ calculateBoardTime()
| double embObjMultipleFTsensors::calculateBoardTime |
( |
eOabstime_t |
current | ) |
|
|
protected |
◆ checkUpdateTimeout()
| bool embObjMultipleFTsensors::checkUpdateTimeout |
( |
eOprotID32_t |
id32, |
|
|
eOabstime_t |
current |
|
) |
| |
|
protected |
◆ cleanup()
| void embObjMultipleFTsensors::cleanup |
( |
void |
| ) |
|
|
protected |
◆ close()
| bool embObjMultipleFTsensors::close |
( |
| ) |
|
◆ getNrOfSixAxisForceTorqueSensors()
| size_t embObjMultipleFTsensors::getNrOfSixAxisForceTorqueSensors |
( |
| ) |
const |
|
overridevirtual |
◆ getNrOfTemperatureSensors()
| size_t embObjMultipleFTsensors::getNrOfTemperatureSensors |
( |
| ) |
const |
|
overridevirtual |
◆ getSixAxisForceTorqueSensorFrameName()
| bool embObjMultipleFTsensors::getSixAxisForceTorqueSensorFrameName |
( |
size_t |
sensorindex, |
|
|
std::string & |
frameName |
|
) |
| const |
|
overridevirtual |
◆ getSixAxisForceTorqueSensorMeasure()
| bool embObjMultipleFTsensors::getSixAxisForceTorqueSensorMeasure |
( |
size_t |
sensorindex, |
|
|
yarp::sig::Vector & |
out, |
|
|
double & |
timestamp |
|
) |
| const |
|
overridevirtual |
◆ getSixAxisForceTorqueSensorName()
| bool embObjMultipleFTsensors::getSixAxisForceTorqueSensorName |
( |
size_t |
sensorindex, |
|
|
std::string & |
name |
|
) |
| const |
|
overridevirtual |
◆ getSixAxisForceTorqueSensorStatus()
| yarp::dev::MAS_status embObjMultipleFTsensors::getSixAxisForceTorqueSensorStatus |
( |
size_t |
sensorindex | ) |
const |
|
overridevirtual |
◆ getTemperatureSensorFrameName()
| bool embObjMultipleFTsensors::getTemperatureSensorFrameName |
( |
size_t |
sensorindex, |
|
|
std::string & |
frameName |
|
) |
| const |
|
overridevirtual |
◆ getTemperatureSensorMeasure() [1/2]
| bool embObjMultipleFTsensors::getTemperatureSensorMeasure |
( |
size_t |
sensorindex, |
|
|
double & |
out, |
|
|
double & |
timestamp |
|
) |
| const |
|
overridevirtual |
◆ getTemperatureSensorMeasure() [2/2]
| bool embObjMultipleFTsensors::getTemperatureSensorMeasure |
( |
size_t |
sensorindex, |
|
|
yarp::sig::Vector & |
out, |
|
|
double & |
timestamp |
|
) |
| const |
|
overridevirtual |
◆ getTemperatureSensorName()
| bool embObjMultipleFTsensors::getTemperatureSensorName |
( |
size_t |
sensorindex, |
|
|
std::string & |
name |
|
) |
| const |
|
overridevirtual |
◆ getTemperatureSensorStatus()
| yarp::dev::MAS_status embObjMultipleFTsensors::getTemperatureSensorStatus |
( |
size_t |
sensorindex | ) |
const |
|
overridevirtual |
◆ initialised()
| bool embObjMultipleFTsensors::initialised |
( |
| ) |
|
|
virtual |
◆ initRegulars()
◆ open()
| bool embObjMultipleFTsensors::open |
( |
yarp::os::Searchable & |
config | ) |
|
◆ sendConfig2boards()
◆ sendStart2boards()
◆ type()
◆ update()
| bool embObjMultipleFTsensors::update |
( |
eOprotID32_t |
id32, |
|
|
double |
timestamp, |
|
|
void * |
rxdata |
|
) |
| |
|
virtual |
◆ checkUpdateTimeoutFlag_
| constexpr bool yarp::dev::embObjMultipleFTsensors::checkUpdateTimeoutFlag_ {false} |
|
staticconstexprprotected |
◆ device_
◆ firstCanTimestamp_
| eOabstime_t yarp::dev::embObjMultipleFTsensors::firstCanTimestamp_ {0} |
|
protected |
◆ firstYarpTimestamp_
| double yarp::dev::embObjMultipleFTsensors::firstYarpTimestamp_ {0} |
|
protected |
◆ ftSensorsData_
| std::map<eOprotID32_t, FtData> yarp::dev::embObjMultipleFTsensors::ftSensorsData_ |
|
protected |
◆ masStatus_
| std::vector<yarp::dev::MAS_status> yarp::dev::embObjMultipleFTsensors::masStatus_ {MAS_WAITING_FOR_FIRST_READ, MAS_WAITING_FOR_FIRST_READ, MAS_WAITING_FOR_FIRST_READ, MAS_WAITING_FOR_FIRST_READ} |
|
protected |
◆ mutex_
| std::shared_mutex yarp::dev::embObjMultipleFTsensors::mutex_ |
|
mutableprotected |
◆ temperaturesensordata_
| std::map<eOprotID32_t, TemperatureData> yarp::dev::embObjMultipleFTsensors::temperaturesensordata_ |
|
protected |
◆ timeoutUpdate_
| std::map<eOprotID32_t, eOabstime_t> yarp::dev::embObjMultipleFTsensors::timeoutUpdate_ |
|
protected |
◆ updateTimeout_
| constexpr eOabstime_t yarp::dev::embObjMultipleFTsensors::updateTimeout_ {11000} |
|
staticconstexprprotected |
◆ useBoardTimeFlag_
| constexpr bool yarp::dev::embObjMultipleFTsensors::useBoardTimeFlag_ {true} |
|
staticconstexprprotected |
The documentation for this class was generated from the following files:
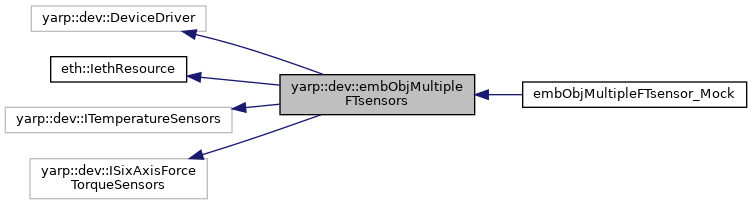
 Inheritance diagram for yarp::dev::embObjMultipleFTsensors:
Inheritance diagram for yarp::dev::embObjMultipleFTsensors: