#include <mutex>#include <condition_variable>#include <string>#include <deque>#include <yarp/os/BufferedPort.h>#include <yarp/os/PeriodicThread.h>#include <yarp/sig/Vector.h>#include <yarp/sig/Matrix.h>#include <yarp/dev/ControlBoardInterfaces.h>#include <yarp/dev/PolyDriver.h>#include <iCub/iKin/iKinHlp.h>#include <iCub/iKin/iKinIpOpt.h> Include dependency graph for iKinSlv.h:
Include dependency graph for iKinSlv.h: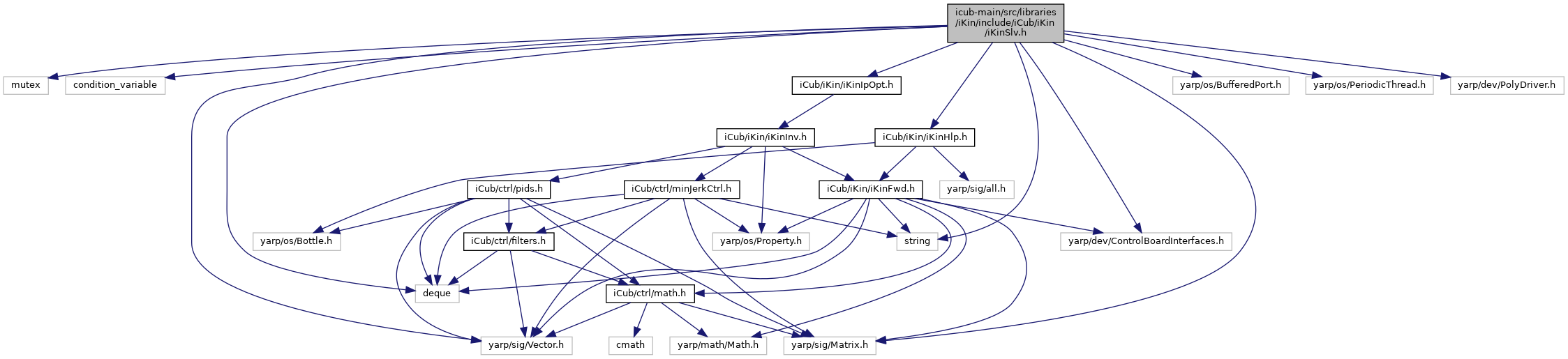 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: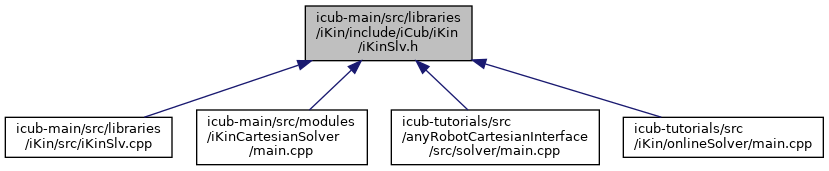
Go to the source code of this file.
Classes | |
| class | iCub::iKin::RpcProcessor |
| class | iCub::iKin::InputPort |
| class | iCub::iKin::SolverCallback |
| struct | iCub::iKin::PartDescriptor |
| class | iCub::iKin::CartesianSolver |
| Abstract class defining the core of on-line solvers. More... | |
| class | iCub::iKin::iCubArmCartesianSolver |
| Derived class which implements the on-line solver for the chain torso+arm. More... | |
| class | iCub::iKin::iCubLegCartesianSolver |
| Derived class which implements the on-line solver for the leg chain. More... | |
Namespaces | |
| namespace | iCub |
| This file contains the definition of unique IDs for the body parts and the skin parts of the robot. | |
| namespace | iCub::iKin |