#include <embObjIMU.h>
 Inheritance diagram for yarp::dev::embObjIMU:
Inheritance diagram for yarp::dev::embObjIMU: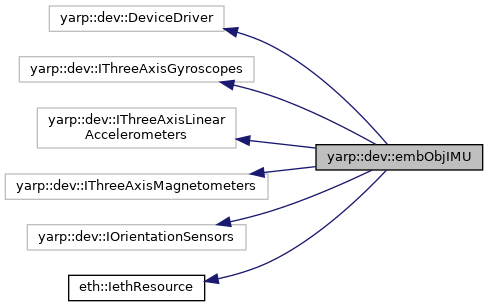
Public Member Functions | |
| embObjIMU () | |
| This device implements the embObjIMU sensor. | |
| ~embObjIMU () | |
| virtual bool | open (yarp::os::Searchable &config) override |
| virtual bool | close () override |
| virtual size_t | getNrOfThreeAxisGyroscopes () const override |
| virtual yarp::dev::MAS_status | getThreeAxisGyroscopeStatus (size_t sens_index) const override |
| virtual bool | getThreeAxisGyroscopeName (size_t sens_index, std::string &name) const override |
| virtual bool | getThreeAxisGyroscopeFrameName (size_t sens_index, std::string &frameName) const override |
| virtual bool | getThreeAxisGyroscopeMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| virtual size_t | getNrOfThreeAxisLinearAccelerometers () const override |
| virtual yarp::dev::MAS_status | getThreeAxisLinearAccelerometerStatus (size_t sens_index) const override |
| virtual bool | getThreeAxisLinearAccelerometerName (size_t sens_index, std::string &name) const override |
| virtual bool | getThreeAxisLinearAccelerometerFrameName (size_t sens_index, std::string &frameName) const override |
| virtual bool | getThreeAxisLinearAccelerometerMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| virtual size_t | getNrOfThreeAxisMagnetometers () const override |
| virtual yarp::dev::MAS_status | getThreeAxisMagnetometerStatus (size_t sens_index) const override |
| virtual bool | getThreeAxisMagnetometerName (size_t sens_index, std::string &name) const override |
| virtual bool | getThreeAxisMagnetometerFrameName (size_t sens_index, std::string &frameName) const override |
| virtual bool | getThreeAxisMagnetometerMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| virtual size_t | getNrOfOrientationSensors () const override |
| virtual yarp::dev::MAS_status | getOrientationSensorStatus (size_t sens_index) const override |
| virtual bool | getOrientationSensorName (size_t sens_index, std::string &name) const override |
| virtual bool | getOrientationSensorFrameName (size_t sens_index, std::string &frameName) const override |
| virtual bool | getOrientationSensorMeasureAsRollPitchYaw (size_t sens_index, yarp::sig::Vector &rpy, double ×tamp) const override |
| virtual bool | initialised () |
| virtual eth::iethresType_t | type () |
| virtual bool | update (eOprotID32_t id32, double timestamp, void *rxdata) |
| Public Member Functions inherited from eth::IethResource | |
| virtual | ~IethResource () |
| const char * | stringOfType () |
| virtual bool | getEntityName (uint32_t entityId, std::string &entityName) |
| virtual bool | getEncoderTypeName (uint32_t jomoId, eOmc_position_t pos, std::string &encoderTypeName) |
| virtual bool | getEntityControlModeName (uint32_t jomoId, eOenum08_t control_mode, std::string &controlModeName, eObool_t compact_string=eobool_true) |
Detailed Description
Definition at line 44 of file embObjIMU.h.
Constructor & Destructor Documentation
◆ embObjIMU()
| embObjIMU::embObjIMU | ( | ) |
This device implements the embObjIMU sensor.
Definition at line 45 of file embObjIMU.cpp.
◆ ~embObjIMU()
| embObjIMU::~embObjIMU | ( | ) |
Definition at line 51 of file embObjIMU.cpp.
Member Function Documentation
◆ close()
|
overridevirtual |
Definition at line 199 of file embObjIMU.cpp.
◆ getNrOfOrientationSensors()
|
overridevirtual |
Definition at line 335 of file embObjIMU.cpp.
◆ getNrOfThreeAxisGyroscopes()
|
overridevirtual |
Definition at line 209 of file embObjIMU.cpp.
◆ getNrOfThreeAxisLinearAccelerometers()
|
overridevirtual |
Definition at line 240 of file embObjIMU.cpp.
◆ getNrOfThreeAxisMagnetometers()
|
overridevirtual |
Definition at line 290 of file embObjIMU.cpp.
◆ getOrientationSensorFrameName()
|
overridevirtual |
Definition at line 360 of file embObjIMU.cpp.
◆ getOrientationSensorMeasureAsRollPitchYaw()
|
overridevirtual |
Definition at line 370 of file embObjIMU.cpp.
◆ getOrientationSensorName()
|
overridevirtual |
Definition at line 350 of file embObjIMU.cpp.
◆ getOrientationSensorStatus()
|
overridevirtual |
Definition at line 340 of file embObjIMU.cpp.
◆ getThreeAxisGyroscopeFrameName()
|
overridevirtual |
Definition at line 228 of file embObjIMU.cpp.
◆ getThreeAxisGyroscopeMeasure()
|
overridevirtual |
Definition at line 234 of file embObjIMU.cpp.
◆ getThreeAxisGyroscopeName()
|
overridevirtual |
Definition at line 222 of file embObjIMU.cpp.
◆ getThreeAxisGyroscopeStatus()
|
overridevirtual |
Definition at line 216 of file embObjIMU.cpp.
◆ getThreeAxisLinearAccelerometerFrameName()
|
overridevirtual |
Definition at line 268 of file embObjIMU.cpp.
◆ getThreeAxisLinearAccelerometerMeasure()
|
overridevirtual |
Definition at line 279 of file embObjIMU.cpp.
◆ getThreeAxisLinearAccelerometerName()
|
overridevirtual |
Definition at line 257 of file embObjIMU.cpp.
◆ getThreeAxisLinearAccelerometerStatus()
|
overridevirtual |
Definition at line 247 of file embObjIMU.cpp.
◆ getThreeAxisMagnetometerFrameName()
|
overridevirtual |
Definition at line 315 of file embObjIMU.cpp.
◆ getThreeAxisMagnetometerMeasure()
|
overridevirtual |
Definition at line 325 of file embObjIMU.cpp.
◆ getThreeAxisMagnetometerName()
|
overridevirtual |
Definition at line 305 of file embObjIMU.cpp.
◆ getThreeAxisMagnetometerStatus()
|
overridevirtual |
Definition at line 295 of file embObjIMU.cpp.
◆ initialised()
|
virtual |
Implements eth::IethResource.
Definition at line 382 of file embObjIMU.cpp.
◆ open()
|
overridevirtual |
Definition at line 115 of file embObjIMU.cpp.
◆ type()
|
virtual |
Implements eth::IethResource.
Definition at line 387 of file embObjIMU.cpp.
◆ update()
|
virtual |
Implements eth::IethResource.
Definition at line 395 of file embObjIMU.cpp.
The documentation for this class was generated from the following files:
- icub-main/src/libraries/icubmod/embObjIMU/embObjIMU.h
- icub-main/src/libraries/icubmod/embObjIMU/embObjIMU.cpp