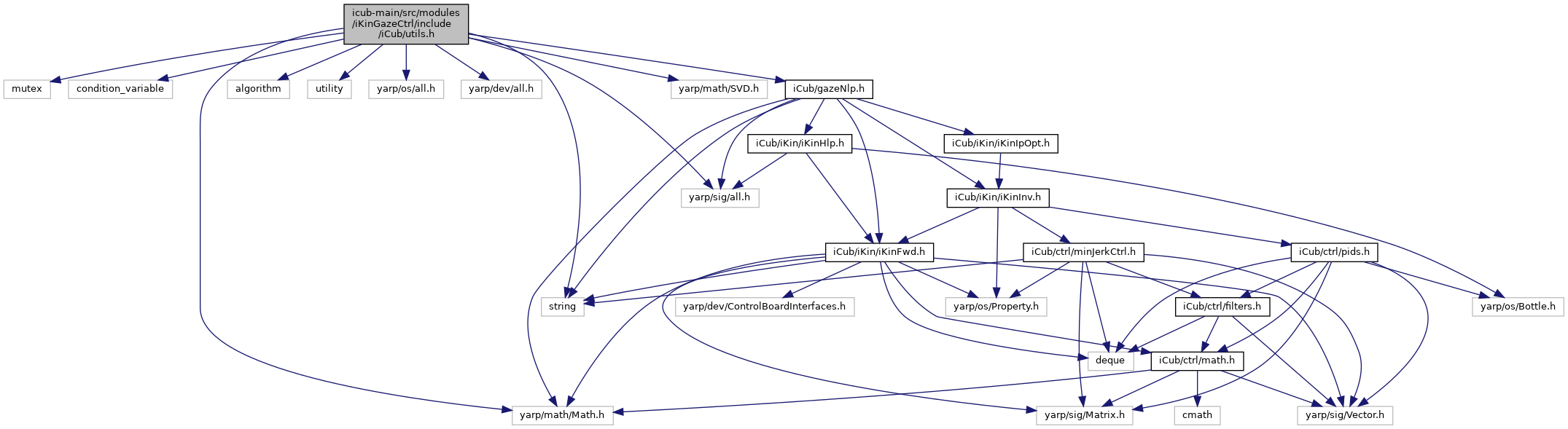
#include <mutex>
#include <condition_variable>
#include <string>
#include <algorithm>
#include <utility>
#include <yarp/os/all.h>
#include <yarp/dev/all.h>
#include <yarp/sig/all.h>
#include <yarp/math/Math.h>
#include <yarp/math/SVD.h>
#include <iCub/gazeNlp.h>
Go to the source code of this file.
|
| double | sat (const double val, const double min, const double max) |
| |
| bool | getCamParams (const ResourceFinder &rf, const string &type, Matrix **Prj, int &w, int &h, const bool verbose=false) |
| |
| bool | getAlignHN (const ResourceFinder &rf, const string &type, iKinChain *chain, const bool verbose=false) |
| |
| Matrix | alignJointsBounds (iKinChain *chain, PolyDriver *drvTorso, PolyDriver *drvHead, const ExchangeData *commData) |
| |
| void | copyJointsBounds (iKinChain *ch1, iKinChain *ch2) |
| |
| void | updateTorsoBlockedJoints (iKinChain *chain, const Vector &fbTorso) |
| |
| void | updateNeckBlockedJoints (iKinChain *chain, const Vector &fbNeck) |
| |
| bool | getFeedback (Vector &fbTorso, Vector &fbHead, PolyDriver *drvTorso, PolyDriver *drvHead, const ExchangeData *commData, double *timeStamp=nullptr) |
| |
◆ alignJointsBounds()
| Matrix alignJointsBounds |
( |
iKinChain * |
chain, |
|
|
PolyDriver * |
drvTorso, |
|
|
PolyDriver * |
drvHead, |
|
|
const ExchangeData * |
commData |
|
) |
| |
◆ copyJointsBounds()
◆ getAlignHN()
| bool getAlignHN |
( |
const ResourceFinder & |
rf, |
|
|
const string & |
type, |
|
|
iKinChain * |
chain, |
|
|
const bool |
verbose = false |
|
) |
| |
◆ getCamParams()
| bool getCamParams |
( |
const ResourceFinder & |
rf, |
|
|
const string & |
type, |
|
|
Matrix ** |
Prj, |
|
|
int & |
w, |
|
|
int & |
h, |
|
|
const bool |
verbose = false |
|
) |
| |
◆ getFeedback()
| bool getFeedback |
( |
Vector & |
fbTorso, |
|
|
Vector & |
fbHead, |
|
|
PolyDriver * |
drvTorso, |
|
|
PolyDriver * |
drvHead, |
|
|
const ExchangeData * |
commData, |
|
|
double * |
timeStamp = nullptr |
|
) |
| |
◆ sat()
| double sat |
( |
const double |
val, |
|
|
const double |
min, |
|
|
const double |
max |
|
) |
| |
|
inline |
◆ updateNeckBlockedJoints()
| void updateNeckBlockedJoints |
( |
iKinChain * |
chain, |
|
|
const Vector & |
fbNeck |
|
) |
| |
◆ updateTorsoBlockedJoints()
| void updateTorsoBlockedJoints |
( |
iKinChain * |
chain, |
|
|
const Vector & |
fbTorso |
|
) |
| |
 Include dependency graph for utils.h:
Include dependency graph for utils.h: