dragonfly2 : framegrabber device driver that can acquire RGB color images in 320x240 or 640x480 resolutions.
More...
#include <DragonflyDeviceDriver2.h>
 Inheritance diagram for yarp::dev::DragonflyDeviceDriver2Rgb:
Inheritance diagram for yarp::dev::DragonflyDeviceDriver2Rgb: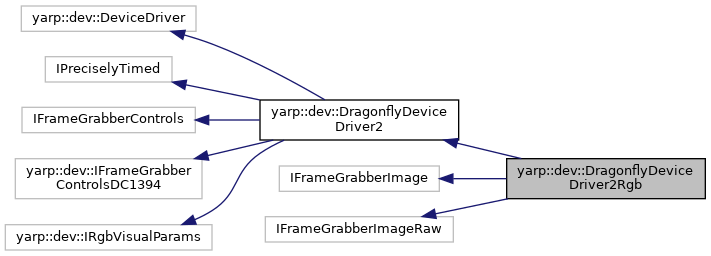
Public Member Functions | |
| DragonflyDeviceDriver2Rgb () | |
| Constructor. | |
| virtual | ~DragonflyDeviceDriver2Rgb () |
| Destructor. | |
| bool | getImage (yarp::sig::ImageOf< yarp::sig::PixelRgb > &image) |
| FrameGrabber image interface, returns the last acquired frame as an rgb image. | |
| bool | getImage (yarp::sig::ImageOf< yarp::sig::PixelMono > &image) |
| FrameGrabber image interface, returns the last acquired frame as a raw image. | |
| virtual int | height () const |
| Return the height of each frame. | |
| virtual int | width () const |
| Return the width of each frame. | |
| Public Member Functions inherited from yarp::dev::DragonflyDeviceDriver2 | |
| DragonflyDeviceDriver2 (bool raw=false) | |
| Constructor. | |
| virtual | ~DragonflyDeviceDriver2 () |
| Destructor. | |
| virtual bool | open (yarp::os::Searchable &config) |
| Open the device driver. | |
| virtual bool | close (void) |
| Closes the device driver. | |
| virtual yarp::os::Stamp | getLastInputStamp () |
| Implements the IPreciselyTimed interface. | |
| virtual bool | setBrightness (double v) |
| Set Brightness. | |
| virtual bool | setExposure (double v) |
| Set Exposure. | |
| virtual bool | setSharpness (double v) |
| Set Sharpness. | |
| virtual bool | setWhiteBalance (double blue, double red) |
| Set White Balance. | |
| virtual bool | setHue (double v) |
| Set Hue. | |
| virtual bool | setSaturation (double v) |
| Set Saturation. | |
| virtual bool | setGamma (double v) |
| Set Gamma. | |
| virtual bool | setShutter (double v) |
| Set Shutter. | |
| virtual bool | setGain (double v) |
| Set Gain. | |
| virtual bool | setIris (double v) |
| Set Iris. | |
| virtual double | getBrightness () |
| Get Brightness. | |
| virtual double | getExposure () |
| Get Exposure. | |
| virtual double | getSharpness () |
| Get Sharpness. | |
| virtual bool | getWhiteBalance (double &blue, double &red) |
| Get White Balance. | |
| virtual double | getHue () |
| Get Hue. | |
| virtual double | getSaturation () |
| Get Saturation. | |
| virtual double | getGamma () |
| Get Gamma. | |
| virtual double | getShutter () |
| Get Shutter. | |
| virtual double | getGain () |
| Get Gain. | |
| virtual double | getIris () |
| Get Iris. | |
| virtual bool | hasFeatureDC1394 (int feature) |
| Is feature present? | |
| virtual bool | setFeatureDC1394 (int feature, double value) |
| Set feature value. | |
| virtual double | getFeatureDC1394 (int feature) |
| Get feature value. | |
| virtual bool | hasOnOffDC1394 (int feature) |
| Can be feature turned on/off? | |
| virtual bool | setActiveDC1394 (int feature, bool onoff) |
| Switch feature on/off. | |
| virtual bool | getActiveDC1394 (int feature) |
| Is feature ON or OFF? | |
| virtual bool | hasAutoDC1394 (int feature) |
| Has feature Auto mode? | |
| virtual bool | hasManualDC1394 (int feature) |
| Has feature Manual mode? | |
| virtual bool | hasOnePushDC1394 (int feature) |
| Has feature Manual mode? | |
| virtual bool | setModeDC1394 (int feature, bool auto_onoff) |
| Switch feature Auto/Manual. | |
| virtual bool | getModeDC1394 (int feature) |
| Is feature mode Auto or Manual? | |
| virtual bool | setOnePushDC1394 (int feature) |
| Trigger feature One Push adjust. | |
| virtual unsigned int | getVideoModeMaskDC1394 () |
| Get supported video mode mask. | |
| virtual unsigned int | getVideoModeDC1394 () |
| Get camera acquisition mode. | |
| virtual bool | setVideoModeDC1394 (int video_mode) |
| Set camera acquisition mode. | |
| virtual unsigned int | getFPSMaskDC1394 () |
| Get supported framerates mask. | |
| virtual unsigned int | getFPSDC1394 () |
| Get camera framerate. | |
| virtual bool | setFPSDC1394 (int fps) |
| Set camera framerate. | |
| virtual unsigned int | getISOSpeedDC1394 () |
| Get camera Firewire ISO speed. | |
| virtual bool | setISOSpeedDC1394 (int speed) |
| Set camera Firewire ISO speed. | |
| virtual unsigned int | getColorCodingMaskDC1394 (unsigned int video_mode) |
| Get supported color coding mask. | |
| virtual unsigned int | getColorCodingDC1394 () |
| Get image color coding. | |
| virtual bool | setColorCodingDC1394 (int coding) |
| Set image color coding. | |
| virtual bool | setWhiteBalanceDC1394 (double b, double r) |
| Set White Balance. | |
| virtual bool | getWhiteBalanceDC1394 (double &b, double &r) |
| Get White Balance. | |
| virtual bool | getFormat7MaxWindowDC1394 (unsigned int &xdim, unsigned int &ydim, unsigned int &xstep, unsigned int &ystep, unsigned int &xoffstep, unsigned int &yoffstep) |
| Get maximum image dimensions in Format 7 mode. | |
| virtual bool | getFormat7WindowDC1394 (unsigned int &xdim, unsigned int &ydim, int &x0, int &y0) |
| Get image dimensions in Format 7 mode. | |
| virtual bool | setFormat7WindowDC1394 (unsigned int xdim, unsigned int ydim, int x0, int y0) |
| Set image dimensions in Format 7 mode. | |
| virtual bool | setOperationModeDC1394 (bool b1394b) |
| Set Operation Mode. | |
| virtual bool | getOperationModeDC1394 () |
| Get Operation Mode. | |
| virtual bool | setTransmissionDC1394 (bool bTxON) |
| Set image transmission ON/OFF. | |
| virtual bool | getTransmissionDC1394 () |
| Is image transmission ON or OFF? | |
| virtual bool | setBroadcastDC1394 (bool onoff) |
| Set feature commands propagation ON/OFF. | |
| virtual bool | setDefaultsDC1394 () |
| Set camera features to default. | |
| virtual bool | setResetDC1394 () |
| virtual bool | setPowerDC1394 (bool onoff) |
| Switch camera power ON/OFF. | |
| virtual bool | setCaptureDC1394 (bool bON) |
| Switch image capture ON/OFF. | |
| virtual unsigned int | getBytesPerPacketDC1394 () |
| Get Firewire communication packet size. | |
| virtual bool | setBytesPerPacketDC1394 (unsigned int bpp) |
| Set Firewire communication packet size. | |
| virtual int | getRgbHeight () |
| Return the height of each frame. | |
| virtual int | getRgbWidth () |
| Return the width of each frame. | |
| virtual bool | getRgbSupportedConfigurations (yarp::sig::VectorOf< yarp::dev::CameraConfig > &configurations) |
| Get the possible configurations of the camera. | |
| virtual bool | getRgbResolution (int &width, int &height) |
| Get the resolution of the rgb image from the camera. | |
| virtual bool | setRgbResolution (int width, int height) |
| Set the resolution of the rgb image from the camera. | |
| virtual bool | getRgbFOV (double &horizontalFov, double &verticalFov) |
| Get the field of view (FOV) of the rgb camera. | |
| virtual bool | setRgbFOV (double horizontalFov, double verticalFov) |
| Set the field of view (FOV) of the rgb camera. | |
| virtual bool | getRgbIntrinsicParam (yarp::os::Property &intrinsic) |
| Get the intrinsic parameters of the rgb camera. | |
| virtual bool | getRgbMirroring (bool &mirror) |
| Get the mirroring setting of the sensor. | |
| virtual bool | setRgbMirroring (bool mirror) |
| Set the mirroring setting of the sensor. | |
| virtual bool | getCameraDescription (CameraDescriptor *camera) |
| virtual bool | hasFeature (int feature, bool *hasFeature) |
| virtual bool | setFeature (int feature, double values) |
| virtual bool | getFeature (int feature, double *values) |
| virtual bool | setFeature (int feature, double value1, double value2) |
| virtual bool | getFeature (int feature, double *value1, double *value2) |
| virtual bool | hasOnOff (int feature, bool *HasOnOff) |
| virtual bool | setActive (int feature, bool onoff) |
| virtual bool | getActive (int feature, bool *isActive) |
| virtual bool | hasAuto (int feature, bool *hasAuto) |
| virtual bool | hasManual (int feature, bool *hasManual) |
| virtual bool | hasOnePush (int feature, bool *hasOnePush) |
| virtual bool | setMode (int feature, FeatureMode mode) |
| virtual bool | getMode (int feature, FeatureMode *mode) |
| virtual bool | setOnePush (int feature) |
Additional Inherited Members | |
| Protected Member Functions inherited from yarp::dev::DragonflyDeviceDriver2 | |
| FeatureMode | TRANSL_MODE (bool mode) |
| bool | TRANSL_MODE (FeatureMode mode) |
| Protected Attributes inherited from yarp::dev::DragonflyDeviceDriver2 | |
| void * | system_resources |
| bool | raw |
Detailed Description
dragonfly2 : framegrabber device driver that can acquire RGB color images in 320x240 or 640x480 resolutions.
See dragonfly2 for for more details.
| YARP device name |
|---|
dragonfly2 |
Definition at line 883 of file DragonflyDeviceDriver2.h.
Constructor & Destructor Documentation
◆ DragonflyDeviceDriver2Rgb()
|
inline |
Constructor.
Definition at line 896 of file DragonflyDeviceDriver2.h.
◆ ~DragonflyDeviceDriver2Rgb()
|
inlinevirtual |
Destructor.
Definition at line 901 of file DragonflyDeviceDriver2.h.
Member Function Documentation
◆ getImage() [1/2]
| bool DragonflyDeviceDriver2Rgb::getImage | ( | yarp::sig::ImageOf< yarp::sig::PixelMono > & | image | ) |
FrameGrabber image interface, returns the last acquired frame as a raw image.
- Parameters
-
image that will store the last frame.
- Returns
- true/false upon success/failure
Definition at line 31 of file DragonflyDeviceDriver2.cpp.
◆ getImage() [2/2]
| bool DragonflyDeviceDriver2Rgb::getImage | ( | yarp::sig::ImageOf< yarp::sig::PixelRgb > & | image | ) |
FrameGrabber image interface, returns the last acquired frame as an rgb image.
A demosaicking method is applied to reconstuct the color from the Bayer pattern of the sensor.
- Parameters
-
image that will store the last frame.
- Returns
- true/false upon success/failure
Definition at line 26 of file DragonflyDeviceDriver2.cpp.
◆ height()
|
virtual |
Return the height of each frame.
- Returns
- image height
Definition at line 41 of file DragonflyDeviceDriver2.cpp.
◆ width()
|
virtual |
Return the width of each frame.
- Returns
- image width
Definition at line 36 of file DragonflyDeviceDriver2.cpp.
The documentation for this class was generated from the following files:
- icub-main/src/libraries/icubmod/dragonfly2/common/DragonflyDeviceDriver2.h
- icub-main/src/libraries/icubmod/dragonfly2/common/DragonflyDeviceDriver2.cpp