Abstract class to handle sub-systems of the icub-client (speech, action, etc...) and the relevant subclasses. More...
 Collaboration diagram for Subsystems:
Collaboration diagram for Subsystems:
Classes | |
| class | icubclient::SubSystem |
| Abstract class to handle sub-systems of the icub-client. More... | |
| class | icubclient::SubSystem_agentDetector |
| SubSystem for agentDetector. More... | |
| class | icubclient::SubSystem_ARE |
| SubSystem to deal with the actionsRenderingEngine module (a.k.a. More... | |
| class | icubclient::SubSystem_babbling |
| SubSystem for babbling. More... | |
| class | icubclient::SubSystem_emotion |
| SubSystem for emotion. More... | |
| class | icubclient::SubSystem_IOL2OPC |
| SubSystem for iol2opc. More... | |
| class | icubclient::SubSystem_KARMA |
| SubSystem to deal with the experimental affordance learning module (a.k.a. More... | |
| class | icubclient::SubSystem_Recog |
| Abstract subSystem for speech recognizer. More... | |
| class | icubclient::SubSystem_SAM |
| SubSystem for SAM. More... | |
| class | icubclient::SubSystem_Speech |
| Abstract subSystem for speech management (Text to Speech) More... | |
| class | icubclient::SubSystem_Speech_eSpeak |
| SubSystem for speech synthesis with emotional tuning of speed and pitch using eSpeak. More... | |
Detailed Description
Abstract class to handle sub-systems of the icub-client (speech, action, etc...) and the relevant subclasses.
Class Documentation
◆ icubclient::SubSystem
| class icubclient::SubSystem |
Abstract class to handle sub-systems of the icub-client.
Definition at line 43 of file subSystem.h.
Inheritance diagram for icubclient::SubSystem: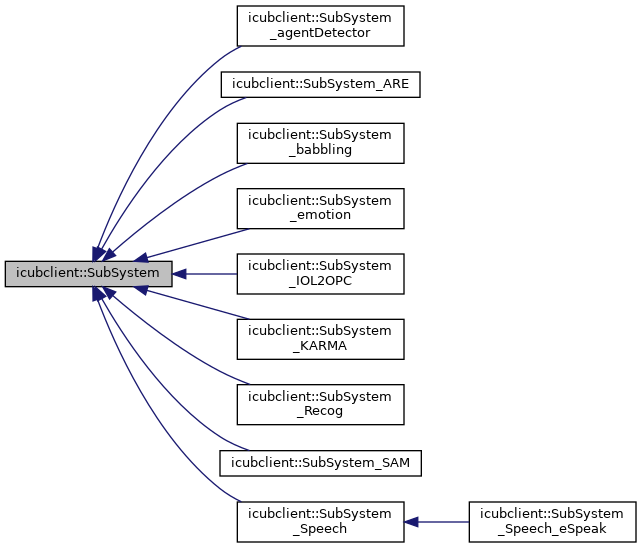
Public Member Functions | |
| SubSystem (const std::string &masterName) | |
| virtual | ~SubSystem () |
| bool | Connect () |
| Connects the subsystem to its "host". More... | |
| virtual void | Close ()=0 |
| Clean up resources. More... | |
| std::string | getType () const |
| Return the type of the subsystem as string. More... | |
Protected Member Functions | |
| virtual bool | connect ()=0 |
Protected Attributes | |
| std::string | m_masterName |
| std::string | m_type |
| yarp::os::RpcClient | portRPC |
Constructor & Destructor Documentation
◆ SubSystem()
|
inline |
Definition at line 53 of file subSystem.h.
◆ ~SubSystem()
|
inlinevirtual |
Definition at line 54 of file subSystem.h.
Member Function Documentation
◆ Close()
|
pure virtual |
Clean up resources.
Implemented in icubclient::SubSystem_KARMA, icubclient::SubSystem_ARE, icubclient::SubSystem_emotion, icubclient::SubSystem_Speech, icubclient::SubSystem_agentDetector, icubclient::SubSystem_IOL2OPC, icubclient::SubSystem_SAM, icubclient::SubSystem_Recog, and icubclient::SubSystem_babbling.
◆ connect()
|
protectedpure virtual |
◆ Connect()
|
inline |
Connects the subsystem to its "host".
- Returns
- True if successful, false otherwise
Definition at line 59 of file subSystem.h.
◆ getType()
|
inline |
Return the type of the subsystem as string.
Definition at line 71 of file subSystem.h.
Member Data Documentation
◆ m_masterName
|
protected |
Definition at line 46 of file subSystem.h.
◆ m_type
|
protected |
Definition at line 47 of file subSystem.h.
◆ portRPC
|
protected |
Definition at line 48 of file subSystem.h.
◆ icubclient::SubSystem_agentDetector
| class icubclient::SubSystem_agentDetector |
SubSystem for agentDetector.
Definition at line 33 of file subSystem_agentDetector.h.
Inheritance diagram for icubclient::SubSystem_agentDetector:
Public Member Functions | |
| SubSystem_agentDetector (const std::string &masterName) | |
| Default constructor. More... | |
| virtual void | Close () |
| Clean up resources. More... | |
| void | pause () |
| Pause the agentDetector. More... | |
| void | resume () |
| The skeleton detection of agentDetector will be resumed. More... | |
| Public Member Functions inherited from icubclient::SubSystem | |
| SubSystem (const std::string &masterName) | |
| virtual | ~SubSystem () |
| bool | Connect () |
| Connects the subsystem to its "host". More... | |
| std::string | getType () const |
| Return the type of the subsystem as string. More... | |
Protected Member Functions | |
| virtual bool | connect () |
| bool | changeDefaultName (const std::string &new_name) |
| Changes the name of the partner within agentDetector Internally used by ICubClient::changeName. More... | |
Friends | |
| class | ICubClient |
Additional Inherited Members | |
| Protected Attributes inherited from icubclient::SubSystem | |
| std::string | m_masterName |
| std::string | m_type |
| yarp::os::RpcClient | portRPC |
Constructor & Destructor Documentation
◆ SubSystem_agentDetector()
| icubclient::SubSystem_agentDetector::SubSystem_agentDetector | ( | const std::string & | masterName | ) |
Default constructor.
- Parameters
-
masterName stem-name used to open up ports.
Definition at line 12 of file subSystem_agentDetector.cpp.
Member Function Documentation
◆ changeDefaultName()
|
protected |
Changes the name of the partner within agentDetector Internally used by ICubClient::changeName.
- Parameters
-
new_name
- Returns
- true if successful, false otherwise
Definition at line 22 of file subSystem_agentDetector.cpp.
◆ Close()
|
virtual |
Clean up resources.
Implements icubclient::SubSystem.
Definition at line 17 of file subSystem_agentDetector.cpp.
◆ connect()
|
protectedvirtual |
Implements icubclient::SubSystem.
Definition at line 4 of file subSystem_agentDetector.cpp.
◆ pause()
| void icubclient::SubSystem_agentDetector::pause | ( | ) |
Pause the agentDetector.
No skeleton information of the human will be updated.
Definition at line 34 of file subSystem_agentDetector.cpp.
◆ resume()
| void icubclient::SubSystem_agentDetector::resume | ( | ) |
The skeleton detection of agentDetector will be resumed.
Definition at line 40 of file subSystem_agentDetector.cpp.
Friends And Related Function Documentation
◆ ICubClient
|
friend |
Definition at line 35 of file subSystem_agentDetector.h.
◆ icubclient::SubSystem_ARE
| class icubclient::SubSystem_ARE |
SubSystem to deal with the actionsRenderingEngine module (a.k.a.
ARE) for motor control.
For further details, please refer to the ARE main page: http://wiki.icub.org/iCub_documentation/group__actionsRenderingEngine.html
Definition at line 41 of file subSystem_ARE.h.
Inheritance diagram for icubclient::SubSystem_ARE:
Public Member Functions | |
| SubSystem_ARE (const std::string &masterName) | |
| Default constructor. More... | |
| void | Close () |
| Clean up resources. More... | |
| bool | getTableHeight (double &height) |
| Gets the table height from ARE. More... | |
| void | selectHandCorrectTarget (yarp::os::Bottle &options, yarp::sig::VectorOf< double > &target, const std::string &objName, const std::string handToUse="") |
| yarp::sig::VectorOf< double > | applySafetyMargins (const yarp::sig::VectorOf< double > &in) |
| Applies safety margins, i.e. More... | |
| bool | home (const std::string &part="all") |
| Put the specified part ih home position. More... | |
| bool | take (const std::string &sName, const yarp::os::Bottle &options=yarp::os::Bottle()) |
| Reach the specified [target] and grasp it. More... | |
| bool | push (const std::string &sName, const yarp::os::Bottle &options=yarp::os::Bottle()) |
| Reach the specified [target] from one side and then push it laterally. More... | |
| bool | point (const yarp::sig::VectorOf< double > &targetUnsafe, const yarp::os::Bottle &options=yarp::os::Bottle()) |
| Point at the specified [target] with the index finger. More... | |
| bool | drop (const yarp::os::Bottle &options=yarp::os::Bottle()) |
| If an object is held, bring it over the table and drop it on a random position. More... | |
| bool | dropOn (const yarp::sig::VectorOf< double > &targetUnsafe, const yarp::os::Bottle &options=yarp::os::Bottle()) |
| Drop the object on a given target. More... | |
| bool | observe (const yarp::os::Bottle &options=yarp::os::Bottle()) |
| Bring the hand in the visual field and move it with the purpose of visual exploration. More... | |
| bool | expect (const yarp::os::Bottle &options=yarp::os::Bottle()) |
| Put one hand forward with the palm facing up and wait for an object. More... | |
| bool | give (const yarp::os::Bottle &options=yarp::os::Bottle()) |
| Put one hand forward with the palm facing up and open the fingers so that the object held in the hand is free to be taken. More... | |
| bool | waving (const bool sw) |
| Enable/disable arms waving. More... | |
| bool | look (const yarp::sig::VectorOf< double > &target, const yarp::os::Bottle &options=yarp::os::Bottle()) |
| Look at the specified [target]. More... | |
| bool | track (const yarp::sig::VectorOf< double > &target, const yarp::os::Bottle &options=yarp::os::Bottle()) |
| Track the specified [target]. More... | |
| bool | impedance (const bool sw) |
| Enable/disable impedance control. More... | |
| bool | setExecTime (const double execTime) |
| Change default arm movement execution time. More... | |
| ~SubSystem_ARE () | |
| Destructor. More... | |
| Public Member Functions inherited from icubclient::SubSystem | |
| SubSystem (const std::string &masterName) | |
| virtual | ~SubSystem () |
| bool | Connect () |
| Connects the subsystem to its "host". More... | |
| std::string | getType () const |
| Return the type of the subsystem as string. More... | |
Protected Member Functions | |
| void | appendCartesianTarget (yarp::os::Bottle &b, const yarp::sig::VectorOf< double > &t) |
| Appends a target vector t to the Bottle b More... | |
| bool | sendCmd (const yarp::os::Bottle &cmd) |
| Sends a command to ARE's cmdPort. More... | |
| bool | connect () |
Protected Attributes | |
| OPCClient * | opc |
| yarp::os::RpcClient | portCmd |
| Port to /ARE/cmd:io. More... | |
| yarp::os::RpcClient | portRPC |
| Port to /ARE/rpc. More... | |
| yarp::os::RpcClient | portGet |
| Port to /ARE/get:io. More... | |
| yarp::os::RpcClient | portCalib |
| Port to iolReachingCalibration. More... | |
| std::string | lastlyUsedHand |
| The hand which was used for the last action. More... | |
| Protected Attributes inherited from icubclient::SubSystem | |
| std::string | m_masterName |
| std::string | m_type |
| yarp::os::RpcClient | portRPC |
Constructor & Destructor Documentation
◆ SubSystem_ARE()
| icubclient::SubSystem_ARE::SubSystem_ARE | ( | const std::string & | masterName | ) |
Default constructor.
- Parameters
-
masterName stem-name used to open up ports.
Definition at line 102 of file subSystem_ARE.cpp.
◆ ~SubSystem_ARE()
| icubclient::SubSystem_ARE::~SubSystem_ARE | ( | ) |
Destructor.
Definition at line 420 of file subSystem_ARE.cpp.
Member Function Documentation
◆ appendCartesianTarget()
|
protected |
Appends a target vector t to the Bottle b
- Parameters
-
b Bottle to append vector to t Vector to be appended
Definition at line 4 of file subSystem_ARE.cpp.
◆ applySafetyMargins()
| yarp::sig::VectorOf< double > icubclient::SubSystem_ARE::applySafetyMargins | ( | const yarp::sig::VectorOf< double > & | in | ) |
Applies safety margins, i.e.
the in vector should be at least table height and at least 0.1m in front of the iCub
- Parameters
-
in "Unsafe" vector
- Returns
- "safe" vector
Definition at line 148 of file subSystem_ARE.cpp.
◆ Close()
|
virtual |
Clean up resources.
Implements icubclient::SubSystem.
Definition at line 114 of file subSystem_ARE.cpp.
◆ connect()
|
protectedvirtual |
Implements icubclient::SubSystem.
Definition at line 76 of file subSystem_ARE.cpp.
◆ drop()
| bool icubclient::SubSystem_ARE::drop | ( | const yarp::os::Bottle & | options = yarp::os::Bottle() | ) |
If an object is held, bring it over the table and drop it on a random position.
- Parameters
-
options Options of ARE commands ("no_head", "no_gaze", "no_sacc", "still", "left", "right").
- Returns
- true in case of successful motor command, false otherwise.
Definition at line 273 of file subSystem_ARE.cpp.
◆ dropOn()
| bool icubclient::SubSystem_ARE::dropOn | ( | const yarp::sig::VectorOf< double > & | targetUnsafe, |
| const yarp::os::Bottle & | options = yarp::os::Bottle() |
||
| ) |
Drop the object on a given target.
- Parameters
-
targetUnsafe Target where to drop in cartesian coordinates options Options of ARE commands ("no_head", "no_gaze", "no_sacc", "still", "left", "right").
- Returns
- true in case of successful motor command, false otherwise.
Definition at line 291 of file subSystem_ARE.cpp.
◆ expect()
| bool icubclient::SubSystem_ARE::expect | ( | const yarp::os::Bottle & | options = yarp::os::Bottle() | ) |
Put one hand forward with the palm facing up and wait for an object.
- Parameters
-
options Options of ARE commands ("no_head", "no_gaze", "no_sacc", "still", "left", "right").
- Returns
- true in case of successful motor command, false otherwise.
Definition at line 330 of file subSystem_ARE.cpp.
◆ getTableHeight()
| bool icubclient::SubSystem_ARE::getTableHeight | ( | double & | height | ) |
Gets the table height from ARE.
- Parameters
-
height - reference to the output double
- Returns
- true on successful communication with ARE, false otherwise
Definition at line 130 of file subSystem_ARE.cpp.
◆ give()
| bool icubclient::SubSystem_ARE::give | ( | const yarp::os::Bottle & | options = yarp::os::Bottle() | ) |
Put one hand forward with the palm facing up and open the fingers so that the object held in the hand is free to be taken.
- Parameters
-
options Options of ARE commands ("no_head", "no_gaze", "no_sacc", "still", "left", "right").
- Returns
- true in case of successful motor command, false otherwise.
Definition at line 346 of file subSystem_ARE.cpp.
◆ home()
| bool icubclient::SubSystem_ARE::home | ( | const std::string & | part = "all" | ) |
Put the specified part ih home position.
- Parameters
-
part the part to be homed ("gaze", "head", "arms", "fingers", "all"; "all" by default).
- Returns
- true in case of successful motor command, false otherwise.
Definition at line 160 of file subSystem_ARE.cpp.
◆ impedance()
| bool icubclient::SubSystem_ARE::impedance | ( | const bool | sw | ) |
Enable/disable impedance control.
- Parameters
-
sw enable/disable if true/false.
- Returns
- true in case of successful request, false otherwise.
Definition at line 404 of file subSystem_ARE.cpp.
◆ look()
| bool icubclient::SubSystem_ARE::look | ( | const yarp::sig::VectorOf< double > & | target, |
| const yarp::os::Bottle & | options = yarp::os::Bottle() |
||
| ) |
Look at the specified [target].
- Parameters
-
target Target to look at in cartesian coordinates options Options of ARE commands ("fixate", "wait", (block_eyes ver)).
- Returns
- true in case of successful motor command, false otherwise.
Definition at line 376 of file subSystem_ARE.cpp.
◆ observe()
| bool icubclient::SubSystem_ARE::observe | ( | const yarp::os::Bottle & | options = yarp::os::Bottle() | ) |
Bring the hand in the visual field and move it with the purpose of visual exploration.
- Parameters
-
options Options of ARE commands ("no_head", "no_gaze", "no_sacc", "still", "left", "right").
- Returns
- true in case of successful motor command, false otherwise.
Definition at line 314 of file subSystem_ARE.cpp.
◆ point()
| bool icubclient::SubSystem_ARE::point | ( | const yarp::sig::VectorOf< double > & | targetUnsafe, |
| const yarp::os::Bottle & | options = yarp::os::Bottle() |
||
| ) |
Point at the specified [target] with the index finger.
The target can be far away from the iCub, e.g. a body part of the human. If the target is further away than 31cm, use the "pfar" functionality of ARE. If it is closer than 31cm, use the "point" functionality of ARE.
- Parameters
-
targetUnsafe Target to point to in cartesian coordinates options Options of ARE commands ("no_head", "no_gaze", "no_sacc", "still", "left", "right").
- Returns
- true in case of successful motor command, false otherwise.
Definition at line 248 of file subSystem_ARE.cpp.
◆ push()
| bool icubclient::SubSystem_ARE::push | ( | const std::string & | sName, |
| const yarp::os::Bottle & | options = yarp::os::Bottle() |
||
| ) |
Reach the specified [target] from one side and then push it laterally.
Optional parameter "away" can be supplied in order to have the robot push the object away from its root reference frame.
- Parameters
-
sName Name of target to push in cartesian coordinates options Options of ARE commands ("no_head", "no_gaze", "no_sacc", "still", "left", "right").
- Returns
- true in case of successful motor command, false otherwise.
Definition at line 211 of file subSystem_ARE.cpp.
◆ selectHandCorrectTarget()
| void icubclient::SubSystem_ARE::selectHandCorrectTarget | ( | yarp::os::Bottle & | options, |
| yarp::sig::VectorOf< double > & | target, | ||
| const std::string & | objName, | ||
| const std::string | handToUse = "" |
||
| ) |
Definition at line 12 of file subSystem_ARE.cpp.
◆ sendCmd()
|
protected |
Sends a command to ARE's cmdPort.
- Parameters
-
cmd Command to be sent
- Returns
- True if successful
Definition at line 62 of file subSystem_ARE.cpp.
◆ setExecTime()
| bool icubclient::SubSystem_ARE::setExecTime | ( | const double | execTime | ) |
Change default arm movement execution time.
- Parameters
-
execTime the arm movement execution time given in seconds.
- Returns
- true in case of successful request, false otherwise.
Definition at line 412 of file subSystem_ARE.cpp.
◆ take()
| bool icubclient::SubSystem_ARE::take | ( | const std::string & | sName, |
| const yarp::os::Bottle & | options = yarp::os::Bottle() |
||
| ) |
Reach the specified [target] and grasp it.
Optional parameter "side" or "above" can be supplied to choose the orientation the robot should keep while performing the action (default: "above").
- Parameters
-
sName Name of target to grasp options Options of ARE commands ("no_head", "no_gaze", "no_sacc", "still", "left", "right").
- Returns
- true in case of successful motor command, false otherwise.
Definition at line 175 of file subSystem_ARE.cpp.
◆ track()
| bool icubclient::SubSystem_ARE::track | ( | const yarp::sig::VectorOf< double > & | target, |
| const yarp::os::Bottle & | options = yarp::os::Bottle() |
||
| ) |
Track the specified [target].
- Parameters
-
target Target to look at in cartesian coordinates options Options of ARE commands ("no_sacc").
- Returns
- true in case of successful motor command, false otherwise.
Definition at line 394 of file subSystem_ARE.cpp.
◆ waving()
| bool icubclient::SubSystem_ARE::waving | ( | const bool | sw | ) |
Enable/disable arms waving.
- Parameters
-
sw enable/disable if true/false.
- Returns
- true in case of successful request, false otherwise.
Definition at line 361 of file subSystem_ARE.cpp.
Member Data Documentation
◆ lastlyUsedHand
|
protected |
The hand which was used for the last action.
Definition at line 51 of file subSystem_ARE.h.
◆ opc
|
protected |
Definition at line 44 of file subSystem_ARE.h.
◆ portCalib
|
protected |
Port to iolReachingCalibration.
Definition at line 49 of file subSystem_ARE.h.
◆ portCmd
|
protected |
Port to /ARE/cmd:io.
Definition at line 46 of file subSystem_ARE.h.
◆ portGet
|
protected |
Port to /ARE/get:io.
Definition at line 48 of file subSystem_ARE.h.
◆ portRPC
|
protected |
Port to /ARE/rpc.
Definition at line 47 of file subSystem_ARE.h.
◆ icubclient::SubSystem_babbling
| class icubclient::SubSystem_babbling |
SubSystem for babbling.
Definition at line 33 of file subSystem_babbling.h.
Inheritance diagram for icubclient::SubSystem_babbling:
Public Member Functions | |
| SubSystem_babbling (const std::string &masterName) | |
| Default constructor. More... | |
| virtual void | Close () |
| Clean up resources. More... | |
| bool | babblingArm (const std::string &babblingLimb, double duration=-1.0) |
| Whole arm babbling. More... | |
| bool | babbling (int jointNumber, const std::string &babblingLimb, double duration=-1.0) |
| Single joint babbling. More... | |
| Public Member Functions inherited from icubclient::SubSystem | |
| SubSystem (const std::string &masterName) | |
| virtual | ~SubSystem () |
| bool | Connect () |
| Connects the subsystem to its "host". More... | |
| std::string | getType () const |
| Return the type of the subsystem as string. More... | |
Protected Member Functions | |
| virtual bool | connect () |
Additional Inherited Members | |
| Protected Attributes inherited from icubclient::SubSystem | |
| std::string | m_masterName |
| std::string | m_type |
| yarp::os::RpcClient | portRPC |
Constructor & Destructor Documentation
◆ SubSystem_babbling()
| icubclient::SubSystem_babbling::SubSystem_babbling | ( | const std::string & | masterName | ) |
Default constructor.
- Parameters
-
masterName stem-name used to open up ports.
Definition at line 12 of file subSystem_babbling.cpp.
Member Function Documentation
◆ babbling()
| bool icubclient::SubSystem_babbling::babbling | ( | int | jointNumber, |
| const std::string & | babblingLimb, | ||
| double | duration = -1.0 |
||
| ) |
Single joint babbling.
- Parameters
-
jointNumber Which joint to babble. babblingLimb The limb to babble. Should be "left_arm" or "right_arm" duration How long to babble for
- Returns
- true if successful
Definition at line 36 of file subSystem_babbling.cpp.
◆ babblingArm()
| bool icubclient::SubSystem_babbling::babblingArm | ( | const std::string & | babblingLimb, |
| double | duration = -1.0 |
||
| ) |
Whole arm babbling.
- Parameters
-
babblingLimb The limb to babble. Should be "left_arm" or "right_arm" duration How long to babble for
- Returns
- true if successful
Definition at line 22 of file subSystem_babbling.cpp.
◆ Close()
|
virtual |
Clean up resources.
Implements icubclient::SubSystem.
Definition at line 17 of file subSystem_babbling.cpp.
◆ connect()
|
protectedvirtual |
Implements icubclient::SubSystem.
Definition at line 4 of file subSystem_babbling.cpp.
◆ icubclient::SubSystem_emotion
| class icubclient::SubSystem_emotion |
SubSystem for emotion.
Definition at line 33 of file subSystem_emotion.h.
Inheritance diagram for icubclient::SubSystem_emotion:
Public Member Functions | |
| SubSystem_emotion (const std::string &masterName) | |
| Default constructor. More... | |
| virtual void | Close () |
| Clean up resources. More... | |
| bool | setEmotion (std::string emotion, std::string part="all") |
| Method to switch iCub emotion for different parts of face. More... | |
| std::pair< std::string, std::string > | getEmotion () |
| Method to get current iCub emotion. More... | |
| Public Member Functions inherited from icubclient::SubSystem | |
| SubSystem (const std::string &masterName) | |
| virtual | ~SubSystem () |
| bool | Connect () |
| Connects the subsystem to its "host". More... | |
| std::string | getType () const |
| Return the type of the subsystem as string. More... | |
Protected Member Functions | |
| virtual bool | connect () |
Friends | |
| class | ICubClient |
Additional Inherited Members | |
| Protected Attributes inherited from icubclient::SubSystem | |
| std::string | m_masterName |
| std::string | m_type |
| yarp::os::RpcClient | portRPC |
Constructor & Destructor Documentation
◆ SubSystem_emotion()
| icubclient::SubSystem_emotion::SubSystem_emotion | ( | const std::string & | masterName | ) |
Default constructor.
- Parameters
-
masterName stem-name used to open up ports.
Definition at line 14 of file subSystem_emotion.cpp.
Member Function Documentation
◆ Close()
|
virtual |
Clean up resources.
Implements icubclient::SubSystem.
Definition at line 19 of file subSystem_emotion.cpp.
◆ connect()
|
protectedvirtual |
Implements icubclient::SubSystem.
Definition at line 6 of file subSystem_emotion.cpp.
◆ getEmotion()
| std::pair< std::string, std::string > icubclient::SubSystem_emotion::getEmotion | ( | ) |
Method to get current iCub emotion.
- Returns
- string with emotion name.
Definition at line 78 of file subSystem_emotion.cpp.
◆ setEmotion()
| bool icubclient::SubSystem_emotion::setEmotion | ( | std::string | emotion, |
| std::string | part = "all" |
||
| ) |
Method to switch iCub emotion for different parts of face.
- Parameters
-
emotion String of emotion name part String of part name - if "all", the whole face is affected
- Returns
- true if command was sent successful.
Definition at line 24 of file subSystem_emotion.cpp.
Friends And Related Function Documentation
◆ ICubClient
|
friend |
Definition at line 35 of file subSystem_emotion.h.
◆ icubclient::SubSystem_IOL2OPC
| class icubclient::SubSystem_IOL2OPC |
SubSystem for iol2opc.
Definition at line 33 of file subSystem_iol2opc.h.
Inheritance diagram for icubclient::SubSystem_IOL2OPC:
Public Member Functions | |
| SubSystem_IOL2OPC (const std::string &masterName) | |
| Default constructor. More... | |
| virtual void | Close () |
| Clean up resources. More... | |
| void | pause () |
| Pause the iol2opc object detection. More... | |
| void | resume () |
| Resume the iol2opc object detection. More... | |
| Public Member Functions inherited from icubclient::SubSystem | |
| SubSystem (const std::string &masterName) | |
| virtual | ~SubSystem () |
| bool | Connect () |
| Connects the subsystem to its "host". More... | |
| std::string | getType () const |
| Return the type of the subsystem as string. More... | |
Protected Member Functions | |
| virtual bool | connect () |
| bool | changeName (const std::string &old_name, const std::string &new_name) |
| Change the name of an object Internally used by ICubClient::changeName. More... | |
Friends | |
| class | ICubClient |
Additional Inherited Members | |
| Protected Attributes inherited from icubclient::SubSystem | |
| std::string | m_masterName |
| std::string | m_type |
| yarp::os::RpcClient | portRPC |
Constructor & Destructor Documentation
◆ SubSystem_IOL2OPC()
| icubclient::SubSystem_IOL2OPC::SubSystem_IOL2OPC | ( | const std::string & | masterName | ) |
Default constructor.
- Parameters
-
masterName stem-name used to open up ports.
Definition at line 12 of file subSystem_iol2opc.cpp.
Member Function Documentation
◆ changeName()
|
protected |
Change the name of an object Internally used by ICubClient::changeName.
- Parameters
-
old_name Name of the object to be changed new_name New name of the object
Definition at line 22 of file subSystem_iol2opc.cpp.
◆ Close()
|
virtual |
Clean up resources.
Implements icubclient::SubSystem.
Definition at line 17 of file subSystem_iol2opc.cpp.
◆ connect()
|
protectedvirtual |
Implements icubclient::SubSystem.
Definition at line 4 of file subSystem_iol2opc.cpp.
◆ pause()
| void icubclient::SubSystem_IOL2OPC::pause | ( | ) |
Pause the iol2opc object detection.
Definition at line 32 of file subSystem_iol2opc.cpp.
◆ resume()
| void icubclient::SubSystem_IOL2OPC::resume | ( | ) |
Resume the iol2opc object detection.
Definition at line 38 of file subSystem_iol2opc.cpp.
Friends And Related Function Documentation
◆ ICubClient
|
friend |
Definition at line 35 of file subSystem_iol2opc.h.
◆ icubclient::SubSystem_KARMA
| class icubclient::SubSystem_KARMA |
SubSystem to deal with the experimental affordance learning module (a.k.a.
KARMA) for motor control.
For further details, please refer to the KARMA main page: http://robotology.github.io/karma/doxygen/doc/html/group__karmaMotor.html
Definition at line 43 of file subSystem_KARMA.h.
Inheritance diagram for icubclient::SubSystem_KARMA:
Public Member Functions | |
| SubSystem_KARMA (const std::string &masterName, const std::string &robot) | |
| Default constructor. More... | |
| void | Close () |
| Clean up resources. More... | |
| yarp::sig::VectorOf< double > | applySafetyMargins (const yarp::sig::VectorOf< double > &in) |
| Applies safety margins, i.e. More... | |
| bool | chooseArm (const std::string &armType) |
| chooseArm (toolAttach in KARMA): wrapper for tool-attach of KARMA, can be used to choose the arm for actions with KARMA More... | |
| void | chooseArmAuto () |
| chooseArmAuto (toolRemove in KARMA): wrapper for tool-remove of Karma, use to clear the arm choise More... | |
| bool | pushAside (const std::string &objName, const yarp::sig::VectorOf< double > &objCenter, const double &targetPosY, const double &theta, const std::string &armType="selectable", const yarp::os::Bottle &options=yarp::os::Bottle()) |
| pushAside (KARMA): push an object to a certain location along y-axis of robot RoF More... | |
| bool | pushFront (const std::string &objName, const yarp::sig::VectorOf< double > &objCenter, const double &targetPosXFront, const std::string &armType="selectable", const yarp::os::Bottle &options=yarp::os::Bottle()) |
| pushFront (KARMA): push an object to a certain location along x-axis of robot RoF More... | |
| bool | push (const yarp::sig::VectorOf< double > &targetCenter, const double theta, const double radius, const yarp::os::Bottle &options=yarp::os::Bottle()) |
| push (KARMA): push to certain position, along a defined direction More... | |
| bool | pullBack (const std::string &objName, const yarp::sig::VectorOf< double > &objCenter, const double &targetPosXBack, const std::string &armType="selectable", const yarp::os::Bottle &options=yarp::os::Bottle()) |
| pullBack (KARMA): pull an object to a certain location along x-axis of robot RoF More... | |
| bool | draw (const yarp::sig::VectorOf< double > &targetCenter, const double theta, const double radius, const double dist, const yarp::os::Bottle &options=yarp::os::Bottle()) |
| draw (KARMA): draw action, along the positive direction of the x-axis (in robot FoR) More... | |
| bool | vdraw (const std::string &objName, const yarp::sig::VectorOf< double > &targetCenter, const double theta, const double radius, const double dist, const yarp::os::Bottle &options=yarp::os::Bottle()) |
| vdraw (KARMA): virtual draw action, along the positive direction of the x-axis (in robot FoR) More... | |
| bool | openCartesianClient () |
| ~SubSystem_KARMA () | |
| Destructor. More... | |
| Public Member Functions inherited from icubclient::SubSystem | |
| SubSystem (const std::string &masterName) | |
| virtual | ~SubSystem () |
| bool | Connect () |
| Connects the subsystem to its "host". More... | |
| std::string | getType () const |
| Return the type of the subsystem as string. More... | |
Protected Member Functions | |
| void | appendTarget (yarp::os::Bottle &b, const yarp::sig::VectorOf< double > &tCenter) |
| Appends a target vector t to the Bottle More... | |
| void | appendDouble (yarp::os::Bottle &b, const double &v) |
| Appends a double value v to the Bottle More... | |
| bool | returnArmSafely (std::string armType) |
| void | selectHandCorrectTarget (yarp::os::Bottle &options, const std::string &targetName, yarp::sig::VectorOf< double > &target, const std::string handToUse="") |
| bool | sendCmd (yarp::os::Bottle &cmd) |
| Sends a command to KARMA's RPC port. More... | |
| bool | connect () |
Protected Attributes | |
| SubSystem_ARE * | SubARE |
| bool | AREconnected |
| std::string | robot |
| double | tableHeight |
| bool | hasTable |
| yarp::os::RpcClient | portStop |
| yarp::os::RpcClient | portVision |
| yarp::os::RpcClient | portFinder |
| yarp::os::RpcClient | portCalib |
| yarp::dev::PolyDriver | driverL |
| yarp::dev::PolyDriver | driverR |
| yarp::dev::PolyDriver | driverHL |
| yarp::dev::PolyDriver | driverHR |
| yarp::dev::ICartesianControl * | iCartCtrlL |
| yarp::dev::ICartesianControl * | iCartCtrlR |
| Protected Attributes inherited from icubclient::SubSystem | |
| std::string | m_masterName |
| std::string | m_type |
| yarp::os::RpcClient | portRPC |
Constructor & Destructor Documentation
◆ SubSystem_KARMA()
| icubclient::SubSystem_KARMA::SubSystem_KARMA | ( | const std::string & | masterName, |
| const std::string & | robot | ||
| ) |
Default constructor.
- Parameters
-
masterName stem-name used to open up ports. robot name of the robot ( icuboricubSim)
Definition at line 132 of file subSystem_KARMA.cpp.
◆ ~SubSystem_KARMA()
| icubclient::SubSystem_KARMA::~SubSystem_KARMA | ( | ) |
Destructor.
Definition at line 502 of file subSystem_KARMA.cpp.
Member Function Documentation
◆ appendDouble()
|
protected |
Appends a double value v to the Bottle
Definition at line 15 of file subSystem_KARMA.cpp.
◆ appendTarget()
|
protected |
Appends a target vector t to the Bottle
Definition at line 8 of file subSystem_KARMA.cpp.
◆ applySafetyMargins()
| yarp::sig::VectorOf< double > icubclient::SubSystem_KARMA::applySafetyMargins | ( | const yarp::sig::VectorOf< double > & | in | ) |
Applies safety margins, i.e.
the in vector should be at least table height and at least 0.1m in front of the iCub
- Parameters
-
in "Unsafe" vector
- Returns
- "safe" vector
Definition at line 172 of file subSystem_KARMA.cpp.
◆ chooseArm()
| bool icubclient::SubSystem_KARMA::chooseArm | ( | const std::string & | armType | ) |
chooseArm (toolAttach in KARMA): wrapper for tool-attach of KARMA, can be used to choose the arm for actions with KARMA
- Parameters
-
armType string value of "left" or "right" arm
Definition at line 236 of file subSystem_KARMA.cpp.
◆ chooseArmAuto()
| void icubclient::SubSystem_KARMA::chooseArmAuto | ( | ) |
chooseArmAuto (toolRemove in KARMA): wrapper for tool-remove of Karma, use to clear the arm choise
Definition at line 248 of file subSystem_KARMA.cpp.
◆ Close()
|
virtual |
Clean up resources.
Implements icubclient::SubSystem.
Definition at line 152 of file subSystem_KARMA.cpp.
◆ connect()
|
protectedvirtual |
Implements icubclient::SubSystem.
Definition at line 82 of file subSystem_KARMA.cpp.
◆ draw()
| bool icubclient::SubSystem_KARMA::draw | ( | const yarp::sig::VectorOf< double > & | targetCenter, |
| const double | theta, | ||
| const double | radius, | ||
| const double | dist, | ||
| const yarp::os::Bottle & | options = yarp::os::Bottle() |
||
| ) |
draw (KARMA): draw action, along the positive direction of the x-axis (in robot FoR)
- Parameters
-
targetCenter center of a circle theta angle between the y-axis (in robot FoR) and starting position of draw action. radius radius of the circle with center at
- See also
- targetCenter
- Parameters
-
dist moving distance of draw action options to be passed to KARMA
- Returns
- true in case of success release, false otherwise
Definition at line 407 of file subSystem_KARMA.cpp.
◆ openCartesianClient()
| bool icubclient::SubSystem_KARMA::openCartesianClient | ( | ) |
Definition at line 449 of file subSystem_KARMA.cpp.
◆ pullBack()
| bool icubclient::SubSystem_KARMA::pullBack | ( | const std::string & | objName, |
| const yarp::sig::VectorOf< double > & | objCenter, | ||
| const double & | targetPosXBack, | ||
| const std::string & | armType = "selectable", |
||
| const yarp::os::Bottle & | options = yarp::os::Bottle() |
||
| ) |
pullBack (KARMA): pull an object to a certain location along x-axis of robot RoF
- Parameters
-
objName name of object to pull (can be empty, in this case no correction is applied by iolReachingCalibration) objCenter coordinate of object targetPosXBack x coordinate of location to pull object to armType "left" or "right" arm to conduct action, otherwise arm will be chosen by KARMA options to be passed to KARMA
- Returns
- true in case of success release, false otherwise
Definition at line 365 of file subSystem_KARMA.cpp.
◆ push()
| bool icubclient::SubSystem_KARMA::push | ( | const yarp::sig::VectorOf< double > & | targetCenter, |
| const double | theta, | ||
| const double | radius, | ||
| const yarp::os::Bottle & | options = yarp::os::Bottle() |
||
| ) |
push (KARMA): push to certain position, along a defined direction
- Parameters
-
targetCenter position to push to. theta angle between the y-axis (in robot FoR) and starting position of push action, defines the direction of push action radius radius of the circle with center at
- See also
- targetCenter
- Parameters
-
options to be passed to KARMA
- Returns
- true in case of success release, false otherwise
Definition at line 345 of file subSystem_KARMA.cpp.
◆ pushAside()
| bool icubclient::SubSystem_KARMA::pushAside | ( | const std::string & | objName, |
| const yarp::sig::VectorOf< double > & | objCenter, | ||
| const double & | targetPosY, | ||
| const double & | theta, | ||
| const std::string & | armType = "selectable", |
||
| const yarp::os::Bottle & | options = yarp::os::Bottle() |
||
| ) |
pushAside (KARMA): push an object to a certain location along y-axis of robot RoF
- Parameters
-
objName name of object (can be empty, in this case no correction is applied by iolReachingCalibration) objCenter coordinate of object targetPosY y coordinate of location to push object to theta angle to define pushing left (0) or right (180) armType "left" or "right" arm to conduct action, otherwise arm will be chosen by KARMA options to be passed to KARMA
- Returns
- true in case of success release, false otherwise
Definition at line 260 of file subSystem_KARMA.cpp.
◆ pushFront()
| bool icubclient::SubSystem_KARMA::pushFront | ( | const std::string & | objName, |
| const yarp::sig::VectorOf< double > & | objCenter, | ||
| const double & | targetPosXFront, | ||
| const std::string & | armType = "selectable", |
||
| const yarp::os::Bottle & | options = yarp::os::Bottle() |
||
| ) |
pushFront (KARMA): push an object to a certain location along x-axis of robot RoF
- Parameters
-
objName name of object (can be empty, in this case no correction is applied by iolReachingCalibration) objCenter coordinate of object targetPosXFront x coordinate of location to push object to armType "left" or "right" arm to conduct action, otherwise arm will be chosen by KARMA options to be passed to KARMA
- Returns
- true in case of success release, false otherwise
Definition at line 303 of file subSystem_KARMA.cpp.
◆ returnArmSafely()
|
protected |
Definition at line 180 of file subSystem_KARMA.cpp.
◆ selectHandCorrectTarget()
|
protected |
Definition at line 21 of file subSystem_KARMA.cpp.
◆ sendCmd()
|
protected |
Sends a command to KARMA's RPC port.
- Parameters
-
cmd Command to be sent
- Returns
- True if successful
Definition at line 71 of file subSystem_KARMA.cpp.
◆ vdraw()
| bool icubclient::SubSystem_KARMA::vdraw | ( | const std::string & | objName, |
| const yarp::sig::VectorOf< double > & | targetCenter, | ||
| const double | theta, | ||
| const double | radius, | ||
| const double | dist, | ||
| const yarp::os::Bottle & | options = yarp::os::Bottle() |
||
| ) |
vdraw (KARMA): virtual draw action, along the positive direction of the x-axis (in robot FoR)
- Parameters
-
targetCenter center of a circle theta angle between the y-axis (in robot FoR) and starting position of draw action. radius radius of the circle with center at
- See also
- targetCenter
- Parameters
-
dist moving distance of draw action options to be passed to KARMA objName name of object to push (can be empty, in this case no correction is applied by iolReachingCalibration)
- Returns
- true in case of success release, false otherwise
Definition at line 427 of file subSystem_KARMA.cpp.
Member Data Documentation
◆ AREconnected
|
protected |
Definition at line 47 of file subSystem_KARMA.h.
◆ driverHL
|
protected |
Definition at line 61 of file subSystem_KARMA.h.
◆ driverHR
|
protected |
Definition at line 62 of file subSystem_KARMA.h.
◆ driverL
|
protected |
Definition at line 59 of file subSystem_KARMA.h.
◆ driverR
|
protected |
Definition at line 60 of file subSystem_KARMA.h.
◆ hasTable
|
protected |
Definition at line 51 of file subSystem_KARMA.h.
◆ iCartCtrlL
|
protected |
Definition at line 64 of file subSystem_KARMA.h.
◆ iCartCtrlR
|
protected |
Definition at line 65 of file subSystem_KARMA.h.
◆ portCalib
|
protected |
Definition at line 56 of file subSystem_KARMA.h.
◆ portFinder
|
protected |
Definition at line 55 of file subSystem_KARMA.h.
◆ portStop
|
protected |
Definition at line 53 of file subSystem_KARMA.h.
◆ portVision
|
protected |
Definition at line 54 of file subSystem_KARMA.h.
◆ robot
|
protected |
Definition at line 49 of file subSystem_KARMA.h.
◆ SubARE
|
protected |
Definition at line 46 of file subSystem_KARMA.h.
◆ tableHeight
|
protected |
Definition at line 50 of file subSystem_KARMA.h.
◆ icubclient::SubSystem_Recog
| class icubclient::SubSystem_Recog |
Abstract subSystem for speech recognizer.
Definition at line 34 of file subSystem_recog.h.
Inheritance diagram for icubclient::SubSystem_Recog:
Public Member Functions | |
| SubSystem_Recog (const std::string &masterName) | |
| Default constructor. More... | |
| virtual void | Close () |
| Clean up resources. More... | |
| void | enableEars (bool on) |
| Send a command to ears whether it should listen to the speechRecognizer. More... | |
| void | waitForEars () |
| Send a command to ears that it should stop listening to the speechRecognizer, and wait until it hands back control. More... | |
| bool | interruptSpeechRecognizer () |
| Interrupt the speech recognizer. More... | |
| yarp::os::Bottle | recogFromGrammar (std::string &sInput) |
| From one grxml grammar, return the sentence recognized for one timeout This is not supported, use SubSystem_Recog::recogFromGrammarLoop() instead! More... | |
| yarp::os::Bottle | recogFromGrammarLoop (std::string sInput, int iLoop=50, bool keepEarsEnabled=false, bool keepEarsDisabledAfterRecog=false) |
| From one grxml grammar, return the first non-empty sentence recognized can last for several timeout (by default 50) More... | |
| Public Member Functions inherited from icubclient::SubSystem | |
| SubSystem (const std::string &masterName) | |
| virtual | ~SubSystem () |
| bool | Connect () |
| Connects the subsystem to its "host". More... | |
| std::string | getType () const |
| Return the type of the subsystem as string. More... | |
Protected Member Functions | |
| virtual bool | connect () |
Protected Attributes | |
| yarp::os::RpcClient | ears_port |
| Port to /ears/rpc. More... | |
| Protected Attributes inherited from icubclient::SubSystem | |
| std::string | m_masterName |
| std::string | m_type |
| yarp::os::RpcClient | portRPC |
Constructor & Destructor Documentation
◆ SubSystem_Recog()
| icubclient::SubSystem_Recog::SubSystem_Recog | ( | const std::string & | masterName | ) |
Default constructor.
- Parameters
-
masterName stem-name used to open up ports.
Definition at line 22 of file subSystem_recog.cpp.
Member Function Documentation
◆ Close()
|
virtual |
Clean up resources.
Implements icubclient::SubSystem.
Definition at line 28 of file subSystem_recog.cpp.
◆ connect()
|
protectedvirtual |
Implements icubclient::SubSystem.
Definition at line 4 of file subSystem_recog.cpp.
◆ enableEars()
| void icubclient::SubSystem_Recog::enableEars | ( | bool | on | ) |
Send a command to ears whether it should listen to the speechRecognizer.
- Parameters
-
on If true, ears will take control of speechRecognizer
Definition at line 35 of file subSystem_recog.cpp.
◆ interruptSpeechRecognizer()
| bool icubclient::SubSystem_Recog::interruptSpeechRecognizer | ( | ) |
Interrupt the speech recognizer.
This can be used to faster get back control of the speech recognizer if it is used by another module currently (e.g. ears).
- Returns
Definition at line 74 of file subSystem_recog.cpp.
◆ recogFromGrammar()
| yarp::os::Bottle icubclient::SubSystem_Recog::recogFromGrammar | ( | std::string & | sInput | ) |
From one grxml grammar, return the sentence recognized for one timeout This is not supported, use SubSystem_Recog::recogFromGrammarLoop() instead!
Definition at line 88 of file subSystem_recog.cpp.
◆ recogFromGrammarLoop()
| yarp::os::Bottle icubclient::SubSystem_Recog::recogFromGrammarLoop | ( | std::string | sInput, |
| int | iLoop = 50, |
||
| bool | keepEarsEnabled = false, |
||
| bool | keepEarsDisabledAfterRecog = false |
||
| ) |
From one grxml grammar, return the first non-empty sentence recognized can last for several timeout (by default 50)
- Parameters
-
sInput the grxml grammar in string form iLoop Maximum number of loops before giving up to recognize input. If -1, loop indefinitely keepEarsEnabled Whether ears should stay in control. This should only be set to true by ears itself keepEarsDisabledAfterRecog If false, ears will be enabled again after an input was recognized. This can be set to true if a module wants to recognize several commands in a row without ever handing back control to ears.
Definition at line 116 of file subSystem_recog.cpp.
◆ waitForEars()
| void icubclient::SubSystem_Recog::waitForEars | ( | ) |
Send a command to ears that it should stop listening to the speechRecognizer, and wait until it hands back control.
Definition at line 57 of file subSystem_recog.cpp.
Member Data Documentation
◆ ears_port
|
protected |
Port to /ears/rpc.
Definition at line 38 of file subSystem_recog.h.
◆ icubclient::SubSystem_SAM
| class icubclient::SubSystem_SAM |
Definition at line 33 of file subSystem_SAM.h.
Inheritance diagram for icubclient::SubSystem_SAM:
Public Member Functions | |
| SubSystem_SAM (const std::string &masterName) | |
| Default constructor. More... | |
| virtual void | Close () |
| Clean up resources. More... | |
| bool | attentionModulation (const std::string &mode) |
| Method to switch attention modes for SAM. More... | |
| yarp::os::Bottle | askXLabel (const std::string &model) |
| Method to trigger a classification from SAM. More... | |
| Public Member Functions inherited from icubclient::SubSystem | |
| SubSystem (const std::string &masterName) | |
| virtual | ~SubSystem () |
| bool | Connect () |
| Connects the subsystem to its "host". More... | |
| std::string | getType () const |
| Return the type of the subsystem as string. More... | |
Public Attributes | |
| bool | attentionSAM |
Protected Member Functions | |
| virtual bool | connect () |
Friends | |
| class | ICubClient |
Additional Inherited Members | |
| Protected Attributes inherited from icubclient::SubSystem | |
| std::string | m_masterName |
| std::string | m_type |
| yarp::os::RpcClient | portRPC |
Constructor & Destructor Documentation
◆ SubSystem_SAM()
| icubclient::SubSystem_SAM::SubSystem_SAM | ( | const std::string & | masterName | ) |
Default constructor.
- Parameters
-
masterName stem-name used to open up ports.
Definition at line 13 of file subSystem_SAM.cpp.
Member Function Documentation
◆ askXLabel()
| yarp::os::Bottle icubclient::SubSystem_SAM::askXLabel | ( | const std::string & | model | ) |
Method to trigger a classification from SAM.
- Parameters
-
model Model name to trigger a classification for
- Returns
- Bottle with success as string as first value and classification as std::string as second value
Definition at line 56 of file subSystem_SAM.cpp.
◆ attentionModulation()
| bool icubclient::SubSystem_SAM::attentionModulation | ( | const std::string & | mode | ) |
Method to switch attention modes for SAM.
- Parameters
-
mode Allowed modes are stopandcontinue.
- Returns
- true if command was send successful.
Definition at line 23 of file subSystem_SAM.cpp.
◆ Close()
|
virtual |
Clean up resources.
Implements icubclient::SubSystem.
Definition at line 18 of file subSystem_SAM.cpp.
◆ connect()
|
protectedvirtual |
Implements icubclient::SubSystem.
Definition at line 5 of file subSystem_SAM.cpp.
Friends And Related Function Documentation
◆ ICubClient
|
friend |
Definition at line 35 of file subSystem_SAM.h.
Member Data Documentation
◆ attentionSAM
| bool icubclient::SubSystem_SAM::attentionSAM |
Definition at line 41 of file subSystem_SAM.h.
◆ icubclient::SubSystem_Speech
| class icubclient::SubSystem_Speech |
Abstract subSystem for speech management (Text to Speech)
Definition at line 38 of file subSystem_speech.h.
Inheritance diagram for icubclient::SubSystem_Speech:
Public Member Functions | |
| SubSystem_Speech (const std::string &masterName) | |
| Default constructor. More... | |
| virtual bool | connect () |
| virtual void | TTS (const std::string &text, bool shouldWait=true) |
| Produce text to speech output. More... | |
| void | SetOptions (const std::string &custom) |
| Set the command line options sent by iSpeak. More... | |
| bool | isSpeaking () |
| Check if iSpeak is currently speaking. More... | |
| virtual void | Close () |
| Clean up resources. More... | |
| Public Member Functions inherited from icubclient::SubSystem | |
| SubSystem (const std::string &masterName) | |
| virtual | ~SubSystem () |
| bool | Connect () |
| Connects the subsystem to its "host". More... | |
| std::string | getType () const |
| Return the type of the subsystem as string. More... | |
Protected Attributes | |
| yarp::os::Port | tts |
| Port to /iSpeak. More... | |
| Protected Attributes inherited from icubclient::SubSystem | |
| std::string | m_masterName |
| std::string | m_type |
| yarp::os::RpcClient | portRPC |
Additional Inherited Members |
Constructor & Destructor Documentation
◆ SubSystem_Speech()
| icubclient::SubSystem_Speech::SubSystem_Speech | ( | const std::string & | masterName | ) |
Default constructor.
- Parameters
-
masterName stem-name used to open up ports.
Definition at line 4 of file subSystem_speech.cpp.
Member Function Documentation
◆ Close()
|
virtual |
Clean up resources.
Implements icubclient::SubSystem.
Definition at line 77 of file subSystem_speech.cpp.
◆ connect()
|
virtual |
Implements icubclient::SubSystem.
Definition at line 11 of file subSystem_speech.cpp.
◆ isSpeaking()
| bool icubclient::SubSystem_Speech::isSpeaking | ( | ) |
Check if iSpeak is currently speaking.
Definition at line 70 of file subSystem_speech.cpp.
◆ SetOptions()
| void icubclient::SubSystem_Speech::SetOptions | ( | const std::string & | custom | ) |
Set the command line options sent by iSpeak.
- Parameters
-
custom The options as a string
Definition at line 58 of file subSystem_speech.cpp.
◆ TTS()
|
virtual |
Produce text to speech output.
- Parameters
-
text The text to be said. shouldWait Is the function blocking until the end of the sentence or not.
Definition at line 27 of file subSystem_speech.cpp.
Member Data Documentation
◆ tts
|
protected |
Port to /iSpeak.
Definition at line 41 of file subSystem_speech.h.
◆ icubclient::SubSystem_Speech_eSpeak
| class icubclient::SubSystem_Speech_eSpeak |
SubSystem for speech synthesis with emotional tuning of speed and pitch using eSpeak.
Definition at line 79 of file subSystem_speech.h.
Inheritance diagram for icubclient::SubSystem_Speech_eSpeak:
Public Member Functions | |
| SubSystem_Speech_eSpeak (std::string &masterName) | |
| void | SetVoiceParameters (int speed=100, int pitch=50, std::string voice="en") |
| Public Member Functions inherited from icubclient::SubSystem_Speech | |
| SubSystem_Speech (const std::string &masterName) | |
| Default constructor. More... | |
| virtual bool | connect () |
| virtual void | TTS (const std::string &text, bool shouldWait=true) |
| Produce text to speech output. More... | |
| void | SetOptions (const std::string &custom) |
| Set the command line options sent by iSpeak. More... | |
| bool | isSpeaking () |
| Check if iSpeak is currently speaking. More... | |
| virtual void | Close () |
| Clean up resources. More... | |
| Public Member Functions inherited from icubclient::SubSystem | |
| SubSystem (const std::string &masterName) | |
| virtual | ~SubSystem () |
| bool | Connect () |
| Connects the subsystem to its "host". More... | |
| std::string | getType () const |
| Return the type of the subsystem as string. More... | |
Protected Attributes | |
| int | m_speed |
| int | m_pitch |
| Protected Attributes inherited from icubclient::SubSystem_Speech | |
| yarp::os::Port | tts |
| Port to /iSpeak. More... | |
| Protected Attributes inherited from icubclient::SubSystem | |
| std::string | m_masterName |
| std::string | m_type |
| yarp::os::RpcClient | portRPC |
Additional Inherited Members |
Constructor & Destructor Documentation
◆ SubSystem_Speech_eSpeak()
|
inline |
Definition at line 87 of file subSystem_speech.h.
Member Function Documentation
◆ SetVoiceParameters()
|
inline |
Definition at line 93 of file subSystem_speech.h.
Member Data Documentation
◆ m_pitch
|
protected |
Definition at line 83 of file subSystem_speech.h.
◆ m_speed
|
protected |
Definition at line 82 of file subSystem_speech.h.
