#include <cmath>#include <yarp/os/Log.h>#include <yarp/math/Math.h>#include <iCub/ctrl/math.h>#include <iCub/ctrl/pids.h> Include dependency graph for pids.cpp:
Include dependency graph for pids.cpp: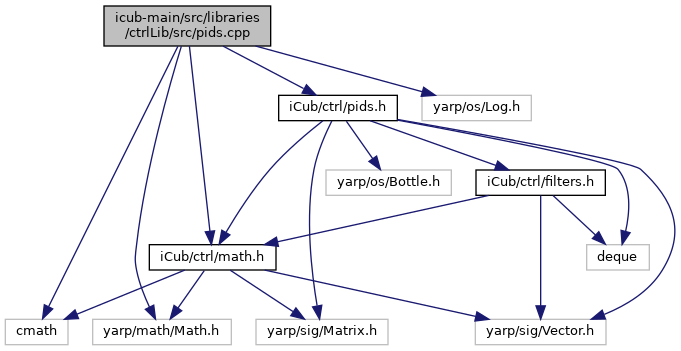
Go to the source code of this file.
Macros | |
| #define | PID_SAT(x, L, H) ((x)>(H)?(H):((x)<(L)?(L):(x))) |