#include <mutex>
#include <cmath>
#include <algorithm>
#include <cctype>
#include <string>
#include <fstream>
#include <iomanip>
#include <map>
#include <yarp/os/all.h>
#include <yarp/sig/all.h>
#include <yarp/dev/all.h>
#include <yarp/dev/MultipleAnalogSensorsInterfaces.h>
#include <iCub/localizer.h>
#include <iCub/solver.h>
#include <iCub/controller.h>
Go to the source code of this file.
|
| int | main (int argc, char *argv[]) |
| |
◆ GAZECTRL_SERVER_VER
| #define GAZECTRL_SERVER_VER "2.0" |
◆ main()
| int main |
( |
int |
argc, |
|
|
char * |
argv[] |
|
) |
| |
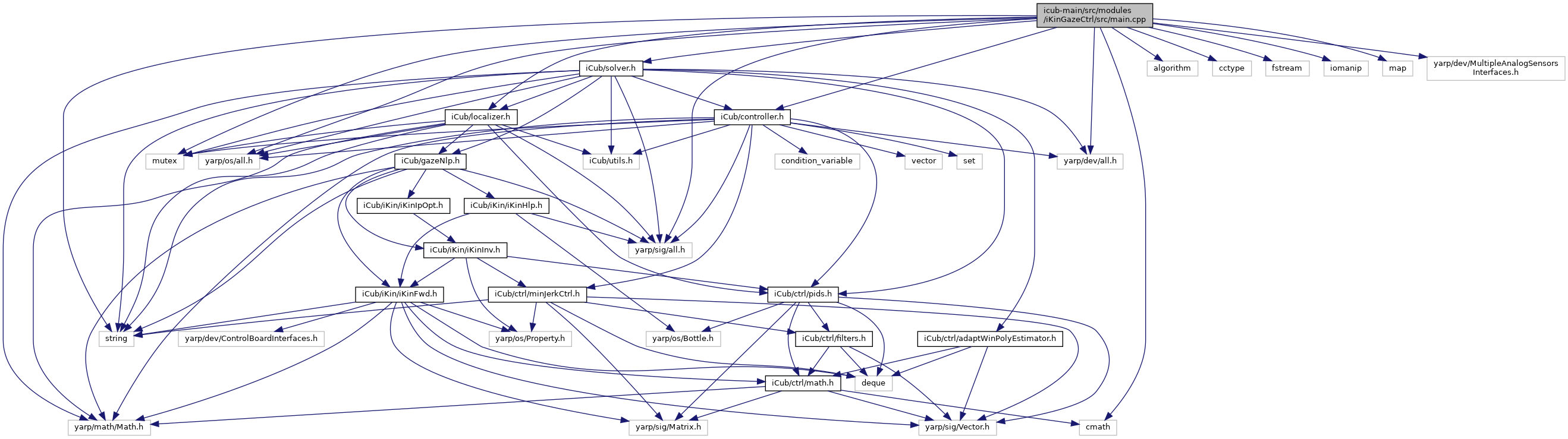
 Include dependency graph for main.cpp:
Include dependency graph for main.cpp: