🚶🏻♂️ Walkthrough
Intro
This sandbox aims to illustrate how iCub can perform grasping within the Gazebo simulation environment.
To this end, we do implement a simple grasping policy that allows representing the partial point cloud of the object observed by the robot as a superquadric, which in turn is used to determine through geometric reasoning a bunch of suitable 3D poses from where to attempt side or top grasps.
Relevantly, this policy is built on the original idea published in Nguyen et al.. Nowadays, autonomous grasping is often achieved by means of advanced end-to-end deep-learning techniques; however, methods that resort to (even straightfoward) geometric rules to find out grasp candidates can still have their say as in e.g. Zapata-Impata et al..
The main stages of the pipeline are briefly outlined in the sections reported hereinafter.
Under the hood
1. Startup
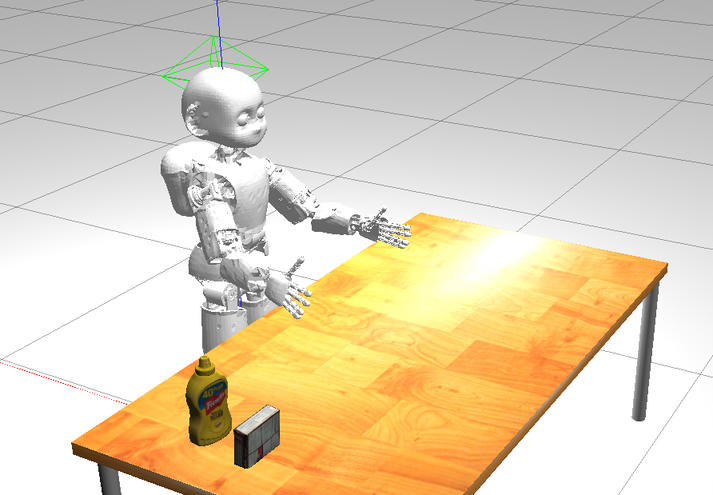
There are two objects located on the table in front of iCub, which are taken from the YCB dataset. The objective is to let iCub grasp them one at time. Therefore, one of the two objects is randomly selected and presented to the robot.
A couple of considerations:
- The two YCB objects have been identified to own the suitable geometric properties that elicit side and top grasps separately.
- For the sake of simplicity and clarity, the code has been designed such that the pipeline can run only in one-shot mode, that is, once a grasp is done, you have to launch the demo again from the beginning to repeat the experiment.
| iCub in front of the table at startup |
 |
| iCub presented with the mustard bottle |
 |
| iCub presented with the pudding box |
 |
2. Scene segmentation and superquadric fitting
The 3D point cloud of the scene acquired from the iCub cameras is processed in order to segment out the
object from the table using a naive RANSAC. The resulting partial point cloud of the object is used
to construct a compact 3D representation based on superquadrics by recruiting a nonlinear fitting.
This operation is performed by the external module find-superquadric. In particular, the
superquadric allows us to get a good guess of how the shape of the object may be completed in the hidden
area, clearly leveraging on the hypothesis of symmetry.
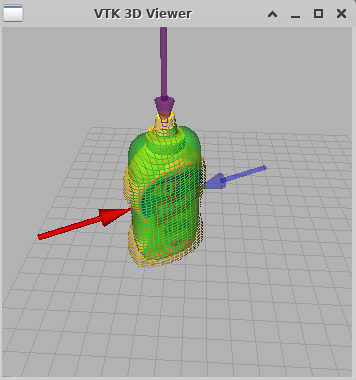
Here below you can find two examples of superquadric representations (the greenish surface) superimposed on the point clouds of the objects:
 |
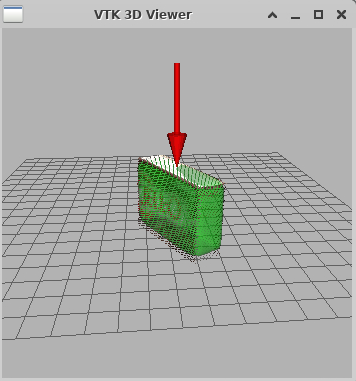 |
3. Evaluation of cardinal-points-grasp candidates
In the figures above you should have also noticed the presence of blue and red arrows. Those arrows depict how effectively iCub will be performing side or top grasps from the indicated approaching directions. Blue and red arrows correspond to grasps executed with the right and the left hand, respectively: the bigger and the less transparent is the arrow, the better the grasp is supposed to be.
The grasp candidates are always anchored to the so-called cardinal points of the superquadric, which are those points located at the intersections between the principal axes of the superquadric and its surface.
To rank grasp candidates, we take into account reachability as well as several geometric characteristics of the object and the iCub hand.
To find out more on how candidates ranking takes place, please refer to the algorithm in Nguyen et al..
| Examples of side and top grasps |
|---|
| What happens if iCub does not find good candidates ❔ |
|---|
Outro
Enjoy this sandbox as a playground to exercise with iCub’s manipulation tasks in Gazebo 🤖
🧪 Also, don’t hesitate to create a copy of the sandbox in your account to build on top new interesting methods. Take a look at this bunch of ideas 💡 to start with.
📢 Don’t forget to let us know about your progress. This is the 📃 list of works ✨ that we know were built on the sandbox.
For your convenience, the latest release of the sandbox codebase can be referenced using this DOI:
![]()
References
- P. D. H. Nguyen, F. Bottarel, U. Pattacini, M. Hoffmann, L. Natale and G. Metta, “Merging Physical and Social Interaction for Effective Human-Robot Collaboration,” 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing, China, 2018, pp. 1-9, doi: 10.1109/HUMANOIDS.2018.8625030.
- B. S. Zapata-Impata, P. Gil, J. Pomares and F. Torres, “Fast geometry-based computation of grasping points on three-dimensional point clouds,” 2019 International Journal of Advanced Robotic Systems, doi: 10.1177/1729881419831846.