#include <mutex>
#include <condition_variable>
#include <string>
#include <vector>
#include <set>
#include <yarp/os/all.h>
#include <yarp/sig/all.h>
#include <yarp/dev/all.h>
#include <yarp/math/Math.h>
#include <iCub/ctrl/minJerkCtrl.h>
#include <iCub/ctrl/pids.h>
#include <iCub/utils.h>
Go to the source code of this file.
◆ GAZECTRL_CRITICVER_STABILIZATION
| constexpr double GAZECTRL_CRITICVER_STABILIZATION = 4.0 |
|
constexpr |
◆ GAZECTRL_MOTIONDONE_EYES_QTHRES
| constexpr double GAZECTRL_MOTIONDONE_EYES_QTHRES = 0.100 |
|
constexpr |
◆ GAZECTRL_MOTIONDONE_NECK_QTHRES
| constexpr double GAZECTRL_MOTIONDONE_NECK_QTHRES = 0.500 |
|
constexpr |
◆ GAZECTRL_SWOFFCOND_DISABLESLOT
| constexpr int32_t GAZECTRL_SWOFFCOND_DISABLESLOT = 10 |
|
constexpr |
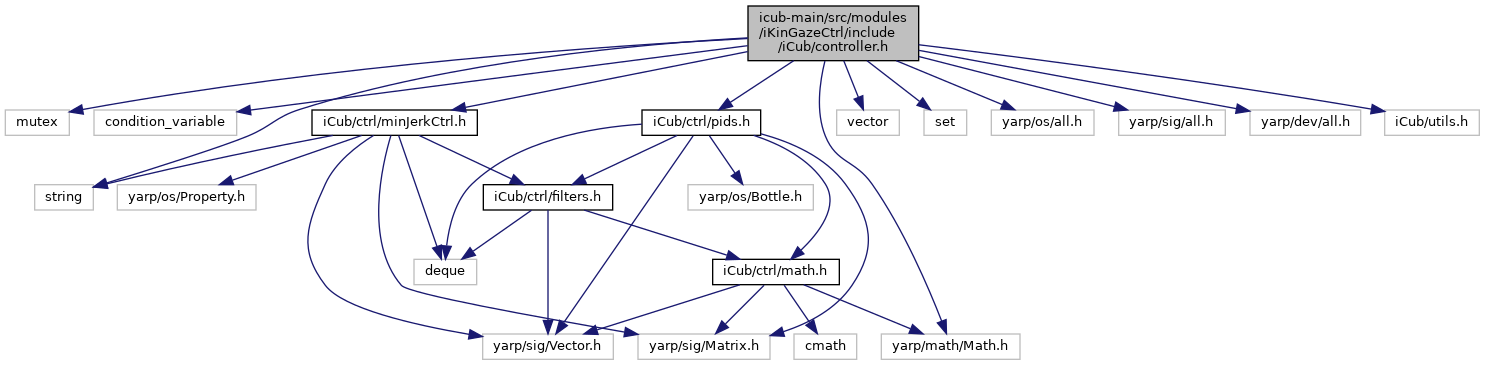
 Include dependency graph for controller.h:
Include dependency graph for controller.h: