 Include dependency graph for PassThroughInertial.cpp:
Include dependency graph for PassThroughInertial.cpp: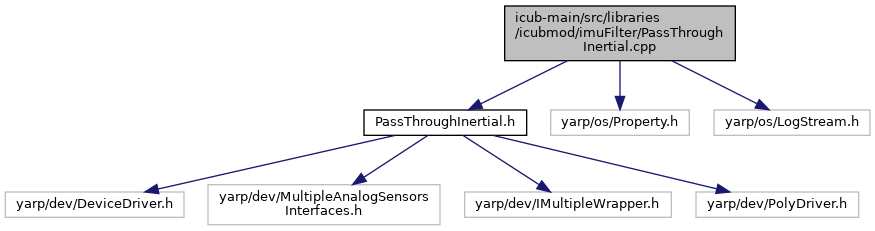
Go to the source code of this file.
Namespaces | |
| namespace | yarp |
| Copyright (C) 2008 RobotCub Consortium. | |
| namespace | yarp::dev |
|
iCub-main
|
Include dependency graph for PassThroughInertial.cpp:Go to the source code of this file.
Namespaces | |
| namespace | yarp |
| Copyright (C) 2008 RobotCub Consortium. | |
| namespace | yarp::dev |