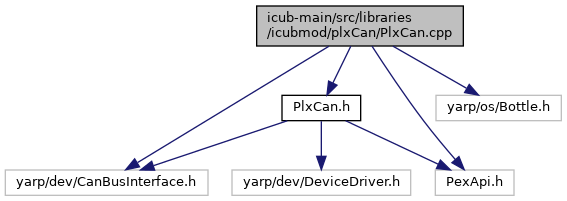
#include "PlxCan.h"#include "PexApi.h"#include <yarp/dev/CanBusInterface.h>#include <yarp/os/Bottle.h> Include dependency graph for PlxCan.cpp:
Include dependency graph for PlxCan.cpp:|
iCub-main
|
#include "PlxCan.h"#include "PexApi.h"#include <yarp/dev/CanBusInterface.h>#include <yarp/os/Bottle.h> Include dependency graph for PlxCan.cpp: